Target Category: Delfino, F280x, F281X, Piccolo, STM32
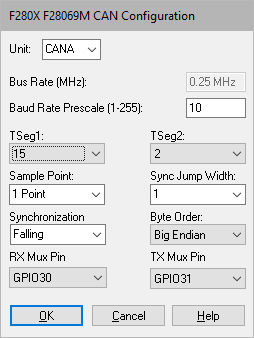
The CAN Config block lets you configure the controller area network for the supported devices. Before you configure the CAN, it is a good idea to first insert a corresponding target configuration block in your diagram and specify the CPU device.
Baud Rate Prescale: Indicates the divisor applied to system clock to obtain the CAN clock. For more information, see http://www.bittiming.can-wiki.info/.
Bus Rate: Indicates the base bit rate of CAN bus messages.
Byte Order: See Texas Instruments or STM32 documentation.
RX Mux Pin: Indicates the RX pin choices for CAN messages. This parameter is available only for devices that support it.
Sample Point: See Texas Instruments or STM32 documentation.
Synchronization: See Texas Instruments or STM32 documentation.
Sync Jump Width: Indicates the amount the CAN unit can adjust timing to synchronize with the bus. (1 for CANopen and DeviceNet.)
TSeg1 and TSeg2: The ratio defines the sampling point for the bit: (Tseg1+1)/(Tseg1+Tseg2+1). For CANopen and DeviceNet, ratio=0.875; for ARINC 825, ratio=0.75. For more information, see http://www.bittiming.can-wiki.info/.
TX Mux Pin: Indicates the RX pin choices for CAN messages. This parameter is available only for devices that support it.
Unit: Specifies the unit.