Target Category: Arduino
Target Sub-Category: IoT > ESP8266WiFi
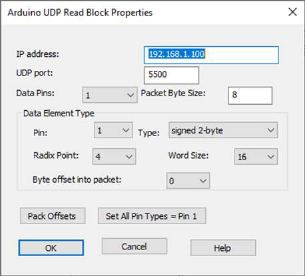
Description: The UDP Read block reads data from the UDP bus.
Data Element Type: Controls the data type of each output pin and the offset into the packet.
Data Pins: Specifies the number of input pins (128 max).
IP Address: Specifies the IP address of the target.
Pack Offsets: Iterates over all the pins and assigns consecutive ascending offsets to each pin.
Packet Byte Size: Specifies the size of the packet to be read (512 bytes max).
Set All Pin Types = Pin 1: Sets the data type of all pins to be the same as pin 1, and then performs a Pack Offset.
UPD Port: Specifies the port to exchange data. It is recommended to use ports greater than 49151.