Target Category: STM32
Sub-Target Category: Quadrature Encoder
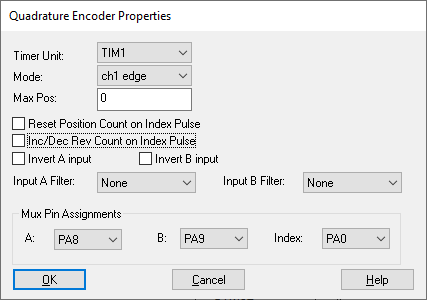
Description: The Quadrature Encoder block lets you read quadrature encoded counts.
Inc/Dec Rev Counts on Index Pulse: Enables the counting of index pulses.
Input A Filter: Establishes the minimum duration that signal A stays transitioned in order to be considered a true transition. Use this parameter to prevent erroneous transitions due to small amounts of noise. For more information, see the SMT32 documentation.
Input B Filter: Establishes the minimum duration that signal B stays transitioned in order to be considered a true transition. Use this parameter to prevent erroneous transitions due to small amounts of noise. For more information, see the SMT32 documentation.
Invert A Input: Inverts the input on A.
Invert B Input: Inverts the input on B.
Max Pos: Indicates the maximum position.
Mode: Enables counting edges on a specific channel or both channels.
Mux Pin Assignments: Assigns a peripheral I/O port to a physical pin on the device.
Reset Position Count on Index Pulse: Resets the position count to 0 when an index pulse occurs.
Timer Unit: Specifies the timer unit to be configured.