Used to denoise objects created in Implicit Modeling. This reduces the size of, or
removes, unwanted small and sharp features in an implicit body.
Smoothing is analogous to “blurring” in digital image processing. It operates by
moving a window of interest (or kernel) through the underlying field, performing
filtering operations on the field values that fall within the window. Example smoothing
filters include Mean, Median,
Gaussian, and Laplacian. Each of these have
relative pros and cons, giving different smoothing effects.
On the Implicit Modeling ribbon, select the
Smooth tool.
Optional: For Visualization Quality, select from
Low to Very High quality,
which corresponds to a low to very high density of elements. A higher quality
produces sharper geometry features but is more computationally intensive. When
creating a complicated function, it’s recommended to work using a lower quality
and then switch to a higher quality after the function is complete.
Select an implicit body to smooth.
Choose the Type of algorithm used to smooth the selected
geometry.
Mean: The scalar value at each location is
replaced with the mean value of all values in the kernel centered at
that location in the field. This approach performs well in planar
regions. However, it has a fillet-like effect on sharp edges, and it can
introduce seams or other noise on curved surfaces that were not
previously in the model. Please note that severe Mean smoothing can
reduce the volume of the model and sometimes destroy thin or small
features.
Median: The scalar value at each location is
replaced by the median of all scalar values in the kernel centered at
that location in the field. This smoothing type is particularly
well-suited to removing "salt-and-pepper" or "impulse" noise, which are
sharp and sudden disturbances in the field. This approach tends to
perform well in planar regions. However, it has a chamfer-like effect on
sharp edges, and it can introduce small seams on curved surfaces that
were previously not in the model. The Median filter is relatively slow
to compute as it is a non-linear rank filter, which requires the scalar
values falling within the kernel to be sorted in order to compute the
median value within the window.
Gaussian: Similar to the Mean approach, but
neighboring values in the window (kernel) are given a different (lower)
weighting than the scalar value at the center of the kernel, assigned
using a Gaussian distribution. Rather than using the computationally
slower true Gaussian distribution, we accurately approximate the
Gaussian distribution by applying five consecutive iterations of a Mean
filter (per iteration of the Gaussian smooth), which gives a very close
approximation to the results of true Gaussian smoothing. This approach
gives a good trade-off between localization and noise removal. However,
it does not handle "salt-and-pepper" or "impulse" noise as well as the
Median approach. Please note that severe Gaussian smoothing can reduce
the volume of the model and sometimes destroy thin or small
features.
Laplacian: This method uses the 7-point Discrete
Laplacian kernel to smooth the scalar field. This is the most gentle of
the smoothing operations, only marginally reducing the volume of the
model with each iteration. Unlike other filters, Laplacian smoothing has
to use more iterations to remove larger artifacts from the model.
Define the Width, which is the size of the smoothing
kernel.
Define the Iterations, which are the number of times the
smoothing kernel runs for.
Define the Strength, which morphs the smoothing results between 0% (no
smoothing at all) and 100% (full-strength smoothing as per the Width and
Iteration settings). The strength should be used to reduce the severity of the
smoothing in delicate applications, such as those with this features. Further
insights can be gained by referring Morph Implicit Geometry.
Click OK.
To give a visual demonstration of how different smoothing techniques impact
Implicit Modeling geometry, the following images have been created using
different smoothing kernels and different settings. Each image has a commentary
that outlines the key observations in each case.
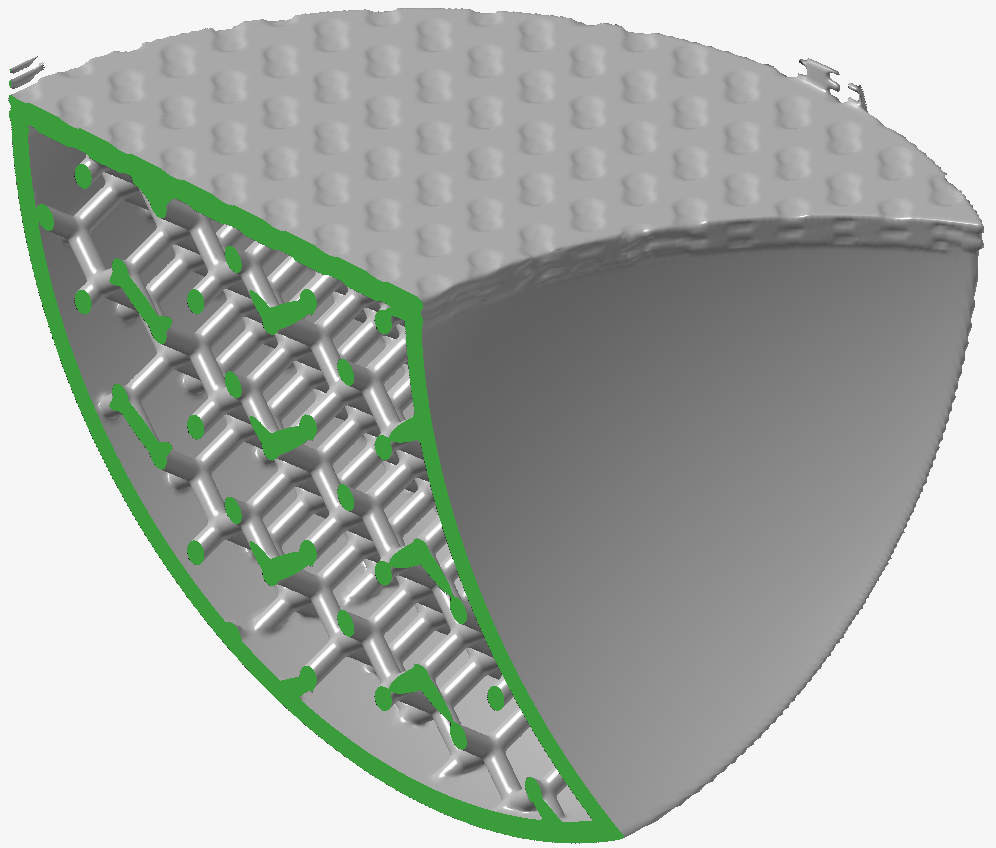
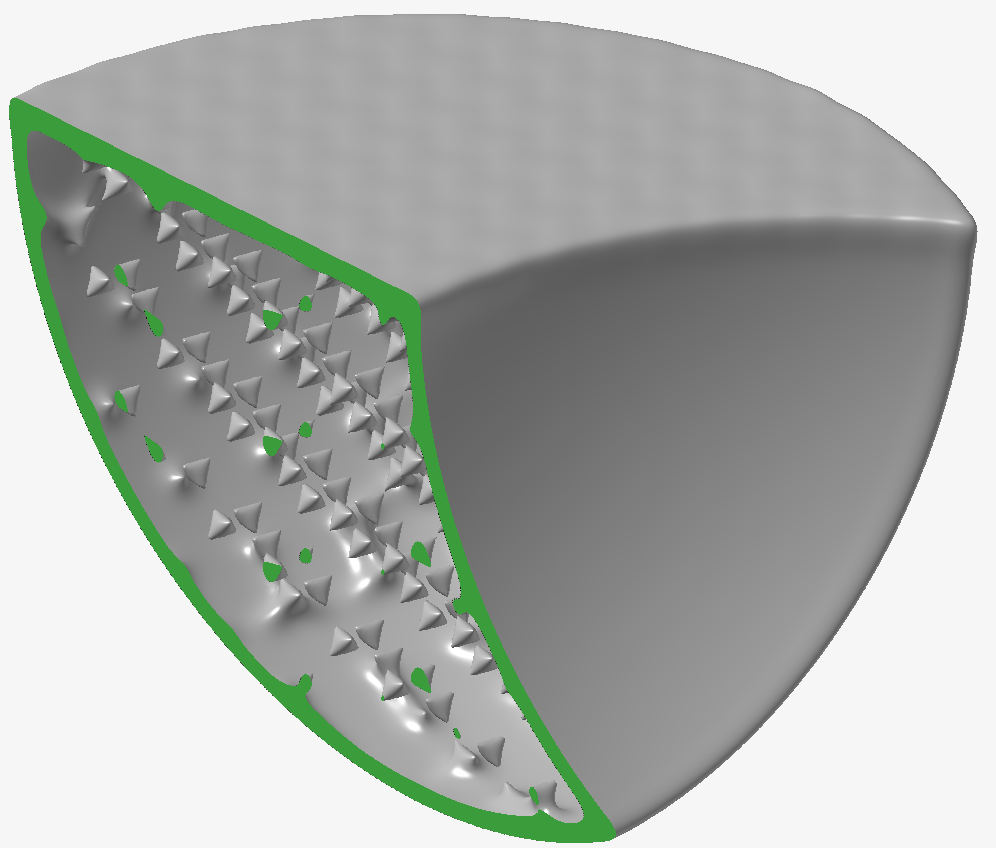
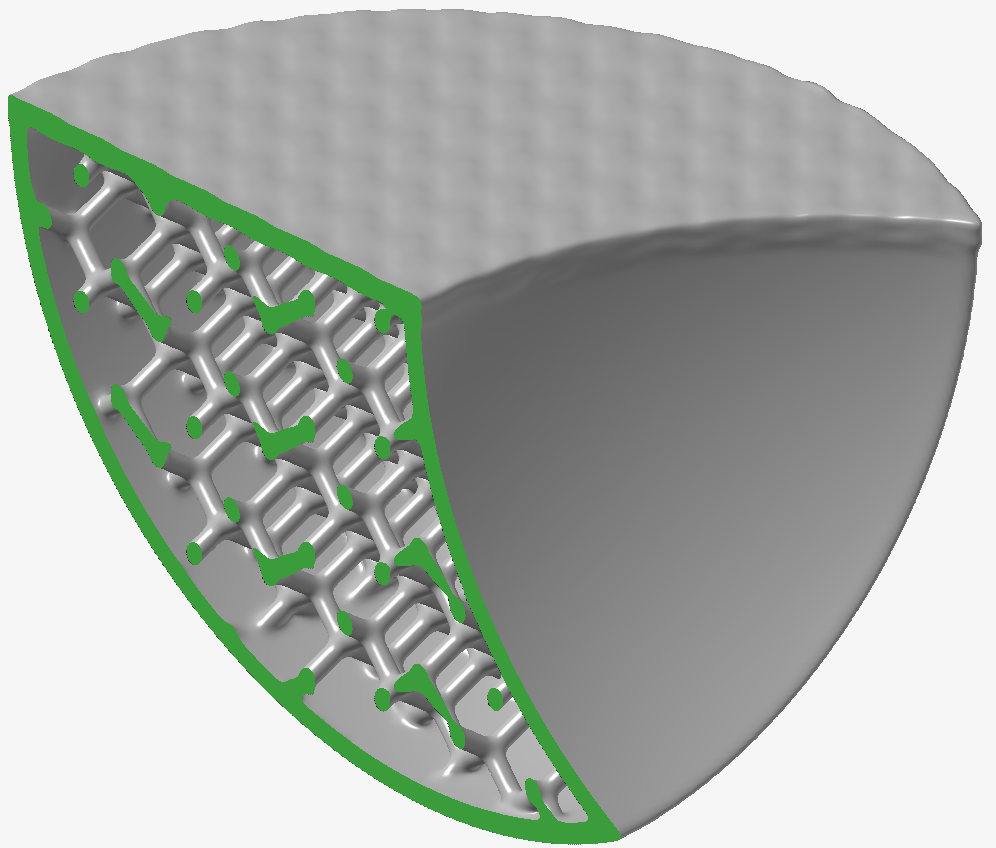
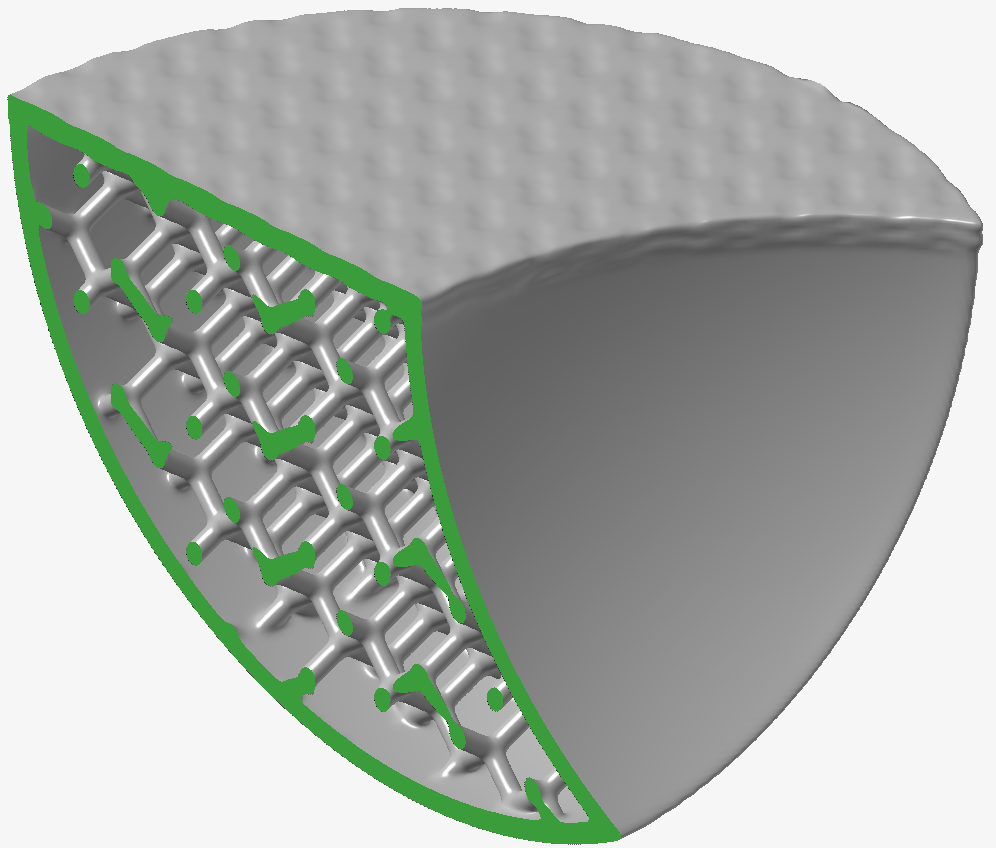
To highlight the strengths and weaknesses of the different smoothing filters,
the following test model has been constructed. It comprises spherical surfaces,
a planar surface, an embedded strut lattice with fine details, and a
deliberately poorly designed texture on the top face, leaving noisy artifacts in
the model. As a result of some of the Boolean operations, areas of high
curvature (somewhat sharp edges and corners) are also present in the model. The
green coloring comes from using a section plane to reveal the lattice inside the
object.
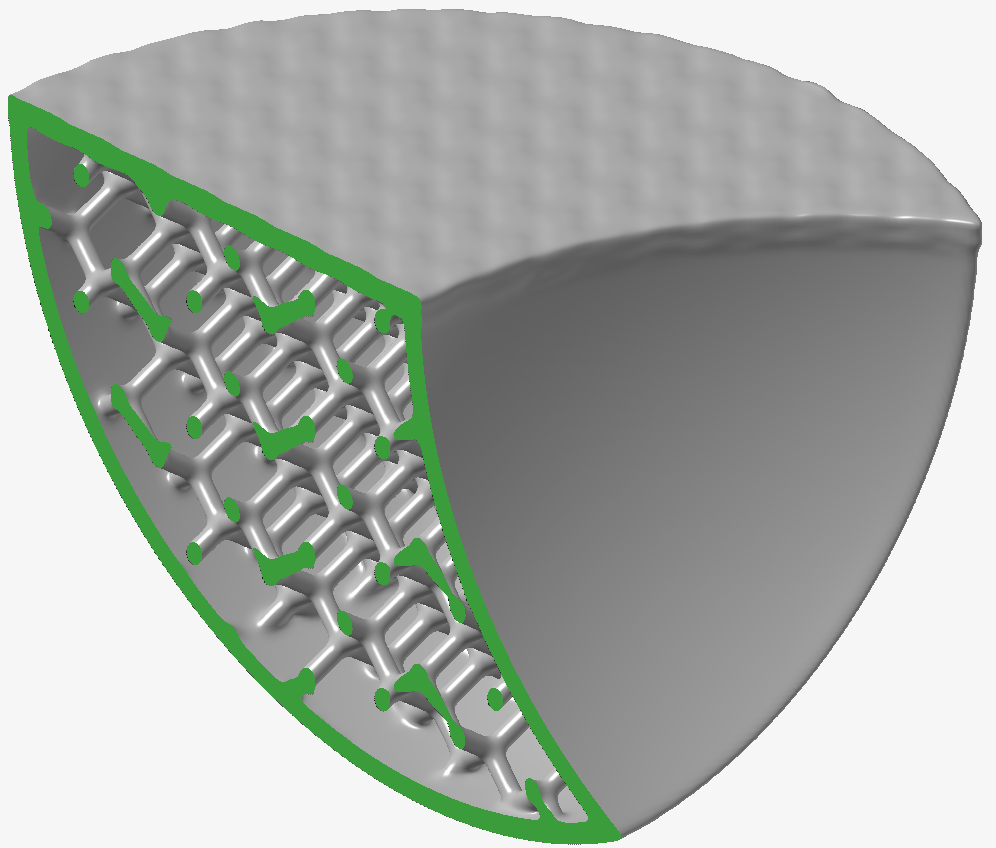
Mean Smoothing
Using a width of 1 (3 x 3 x 3 voxel kernel)
and a single iteration:
Noisy artifacts removed from top face.
The texture depth and detail have both been reduced.
The noise along the sharper spherical edges has been reduced in a
desirable manner.
Some spherical edges that we may have wished to remain sharp have
been noticeably rounded.
The lattice struts are marginally thinner, but the junctions at the
nodes and with the outer body have a noticeable fillet-like joint,
which can be very useful for relieving stress raisers.
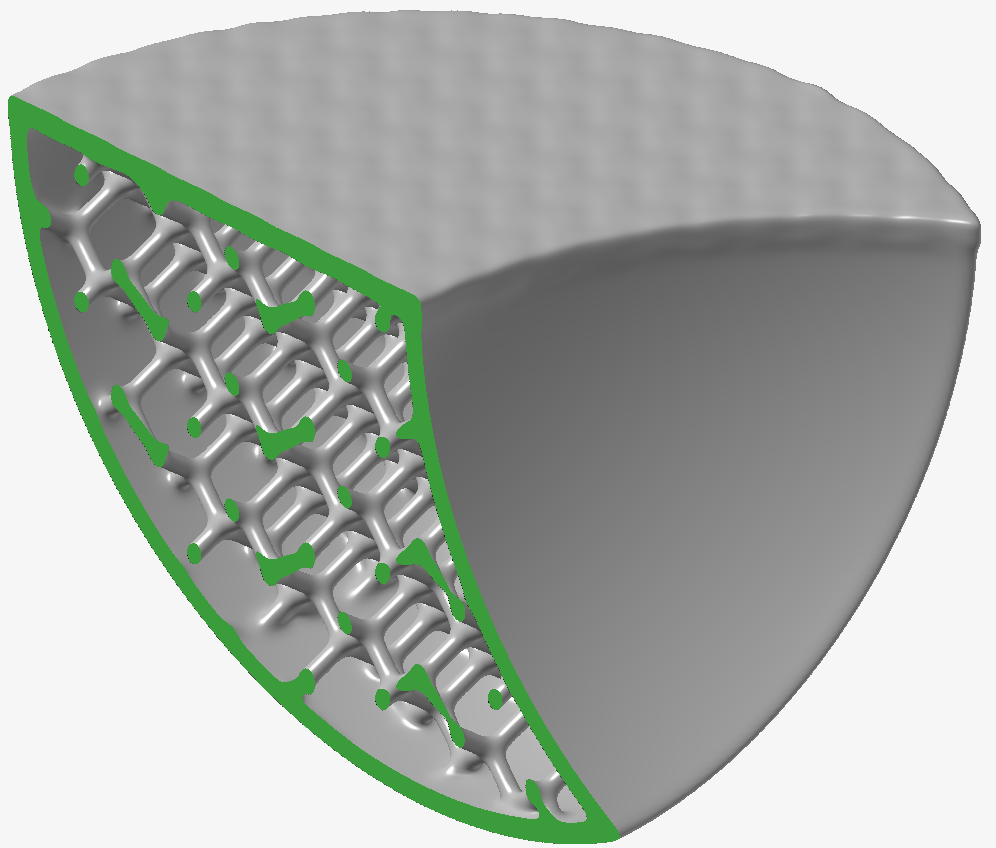
Using a width of 1 (3 x 3 x 3 voxel kernel) and two iterations
increases the severity of all of the effects outlined in the previous list
of bullet points. There is further loss of detail in the texture, further
rounding of sharp edges, and the struts of the lattices are thinner
still.
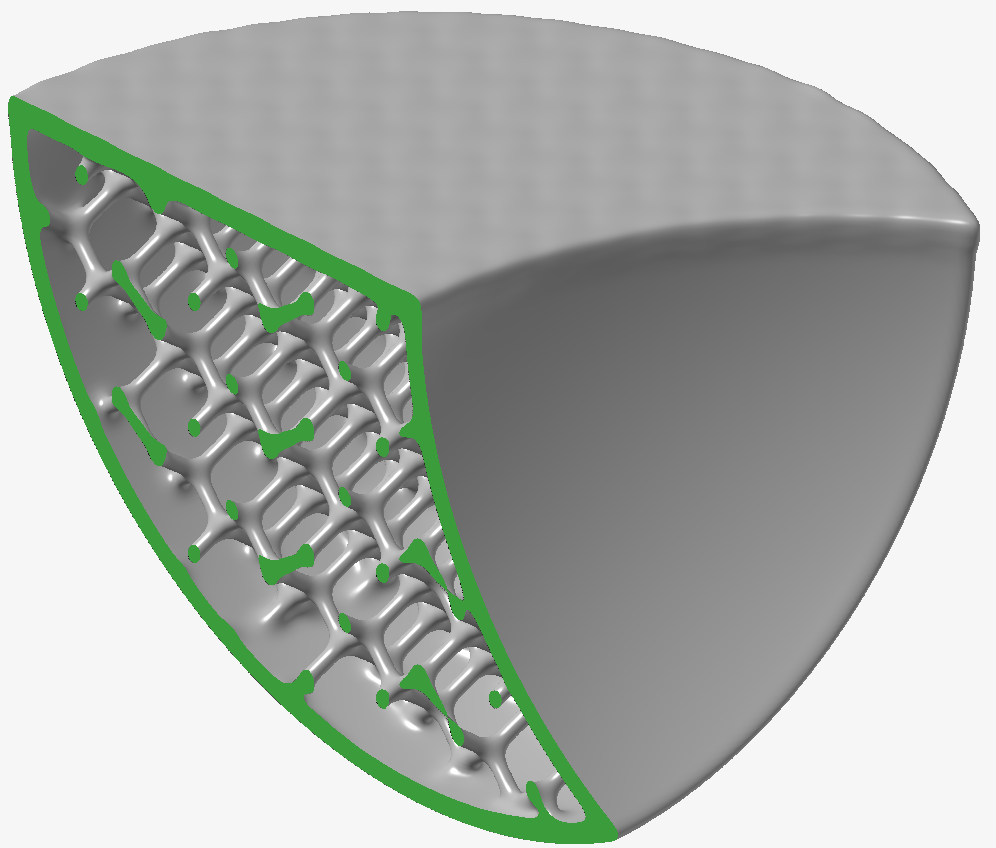
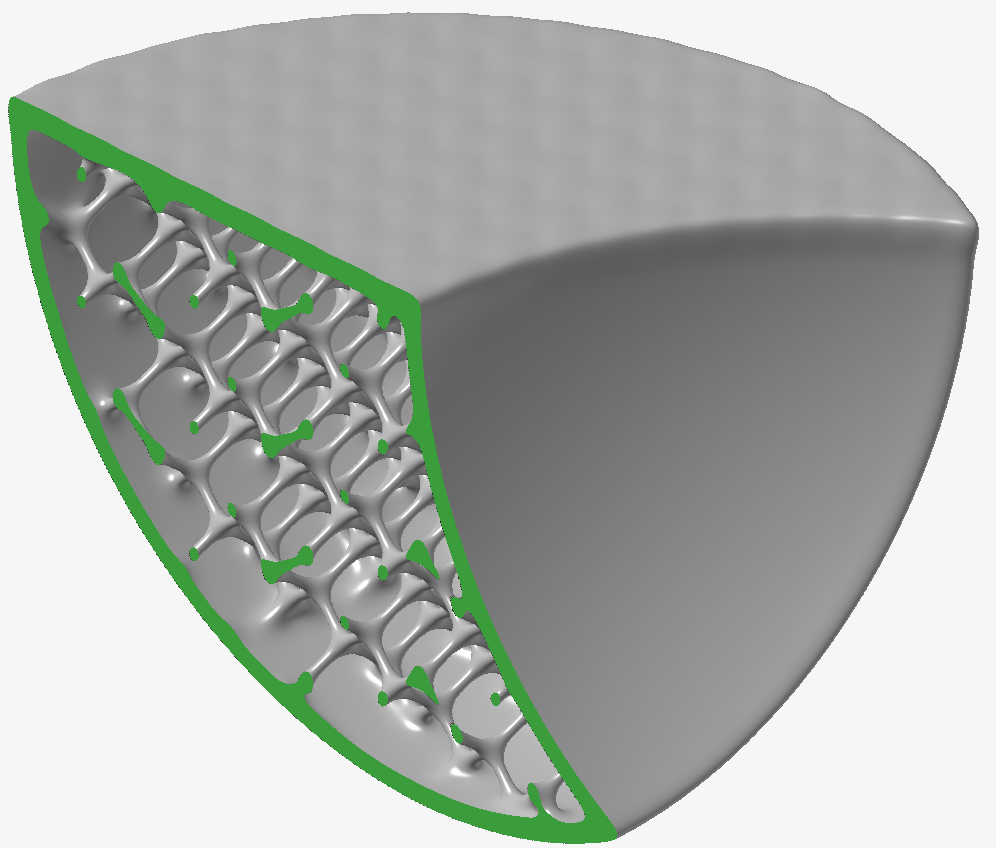
Interestingly, increasing the width of the kernel to two (5 x 5
x 5 voxel kernel) and using a single iteration is more severe than the
previous example of using the same kernel with two iterations. In the image
below, the struts in the lattice are thinner still, and the texture is
almost completely lost.
Finally, using a width of two and two iterations, the Mean
smoothing starts to destroy struts in the lattice and the texture has
practically disappeared.
Median Smoothing
Median smoothing is quite
different from the other filters in terms of mathematical and computational
composition. It is the only filter that ranks the values within the kernel,
before selecting the middle value. It is therefore inherently non-linear.
Using a kernel width of one and a single iteration, the following results
are achieved:
Noisy artifacts removed from the top face.
The texture depth and detail have both been preserved (more than
Mean smoothing).
The noise along the sharper spherical edges has been reduced in a
desirable manner.
Some spherical edges that we may have wished to remain sharp are
sharper than with Mean smoothing.
The lattice struts are marginally thinner, but the junctions at the
nodes and with the outer body have a noticeable fillet-like joint,
which can be very useful for relieving stress raisers.
It is sufficient to say that using a lower width with more iterations is
generally less severe than using a larger width with fewer iterations. To
show the more severe effects, the next image was created using a width of
two and two iterations. The key observations are as follows:
The texture is clearly still visible.
The nodes of the lattice have been rounded, but the width of the
struts in the lattice has been severely reduced. However, many of
the struts are still visible, unlike when using the same settings on
the Mean smoothing.
Some of the sharper edges have been rounded, whereas others are
starting to present a chamfer-like effect.
The spherical surface is starting to exhibit straight-line
patterning/texturing. This is a result of the non-linear nature of
the smoothing filter. This is highlight from a different view in the
second image below.
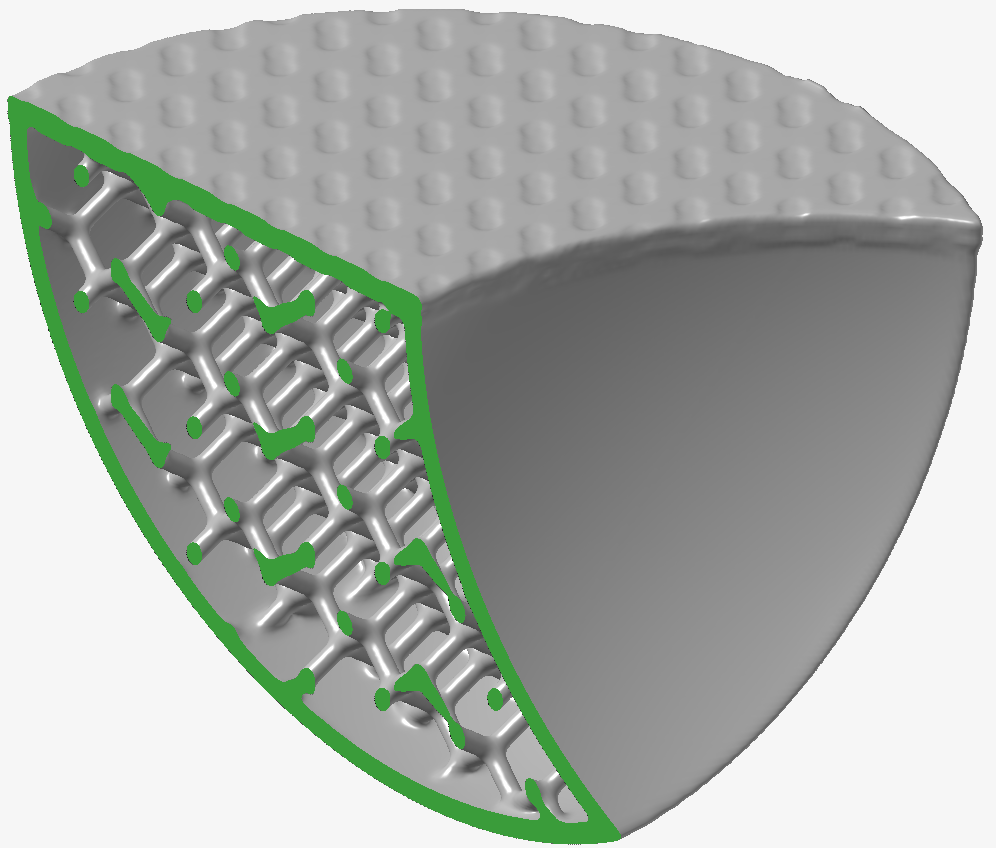
Gaussian Smoothing
In this implementation, a
single iteration of Gaussian smoothing is approximated by running five
consecutive iterations of Mean smoothing, which gives a very close
approximation. As such, the attributes of Gaussian smoothing are largely in
line with those for Mean smoothing with multiple iterations. However, as you
might expect, Gaussian smoothing gives a somewhat harsh smoothing effect,
reducing the thickness of fine features. The image below shows one iteration
of Gaussian smoothing, which successfully removes noisy features and
attractive blends have been created between the lattice and the outer body.
In addition, some of the detail in the texture has been lost, sharp edges
have been rounded, and some of the lattice struts have reduced in width.
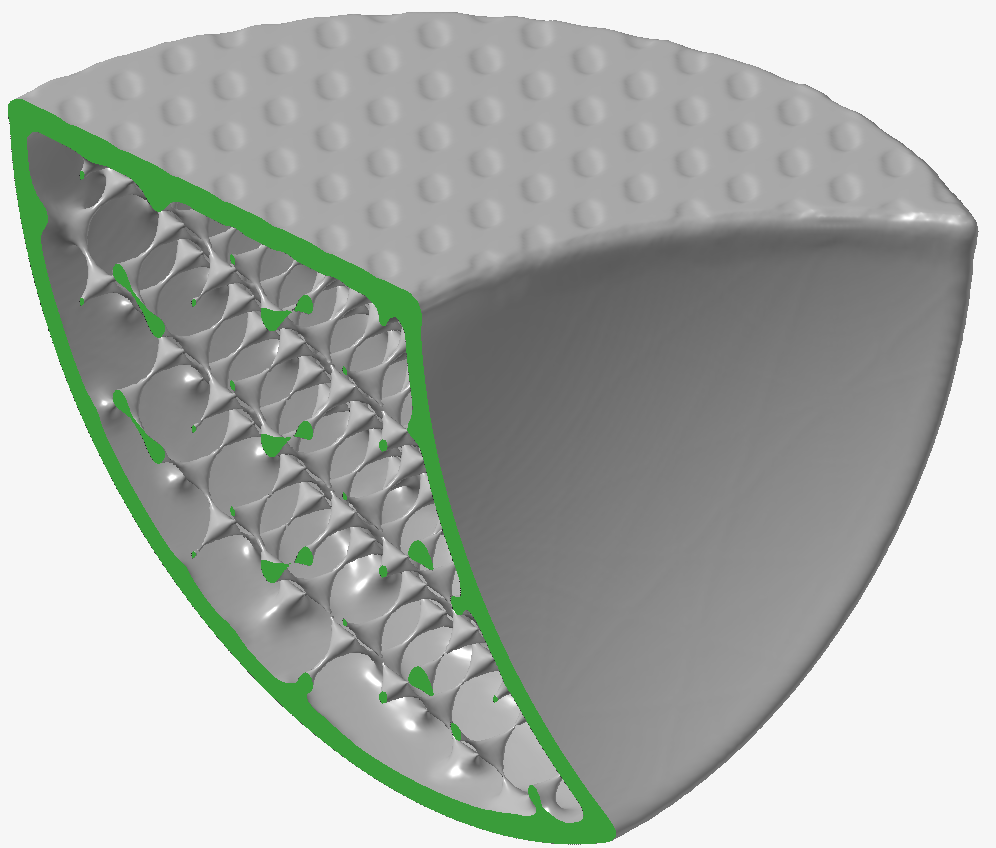
Laplacian Smoothing
Laplacian smoothing gives a
gentler treatment than the other smoothing techniques. As such, more
iterations are needed to remove larger artifacts. Although Laplacian
smoothing does still reduce the thickness of the model, the fact that more
iterations are needed gives a finer control over the balance between
artifact removal and thickness preservation. The two images below were
created using a width of one, and one (top) and nine (bottom) iterations,
respectively. This gives you a feel for how gradual the smoothing and
thinning effects are.