Single Tire Entity Editor
Tire - Property File
- Tire Property File
-
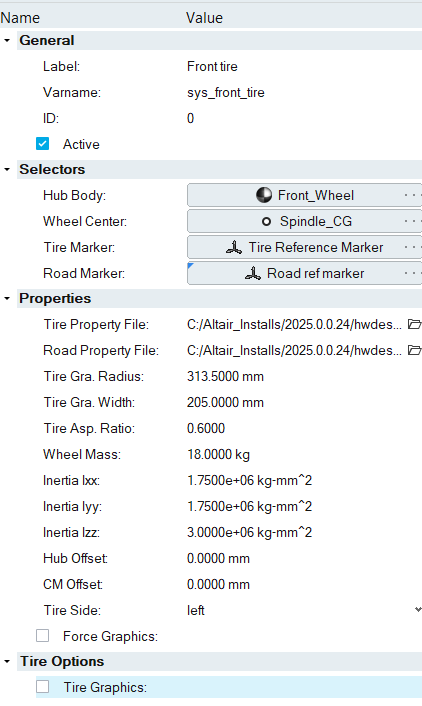
Parameter Description Tire Property File Browse and select the required file. Edit File Edit the file and save the edited file. Tire Graphic Radius Distance between the WC and the contact point of tire in unloaded conditions. Tire Graphic Width Section width of the tire. Tire Graphic Aspect Ratio Describes the sidewall height as a percentage of the tire section width. Tire Side Defines the left or right side of the tire. Wheel Mass The meaning of wheel mass changes with a tire model. Fiala, Simplified durability tire Mass of rim + Mass of Tire MF-Tyre, MF-SWIFT Mass of the rim + Mass of tire ‘Mass of tire’ should include the tire belt mass which can be read from Tire property file (INERTIA block) or it can be read from MotionSolve log file. FTire Mass of the rim + Mass of ‘rim-fixed’ tire parts Or
Mass of the rim + Mass of the tire – Mass of the ‘free’ tire parts
rim-fixed tire parts are not accounted in FTire model, only ‘free’ tire mass is accounted. These masses can be read from the tire property file or can be read from the MotionSolve log file. CDTire Mass of the rim + Mass of ‘rim-fixed’ tire parts Or
Mass of the rim + Mass of the tire – Mass of the ‘free’ tire parts
rim-fixed tire parts are not accounted in the CDTire model, only ‘free’ tire mass is accounted. These masses can be read from the tire property file or can be read from the CDTire log file. Inpl.Iner.Ixx, Inpl.Iner.Iyy Moment of Inertia of the wheel in the wheel plane. Adjust the wheel inertia per the tire model by including the inertias of tire fixed parts that are not accounted for in the tire models.
Rot.Iner.Izz Moment of inertia of the wheel about the spin axis. Adjust the wheel inertia by including or excluding the inertias of tire parts that are accounted for or not accounted for in the tire models.
Hub Offset Defines the offset of Hub graphic center from the wheel center. Wheel CM offset Defines the wheel part CM offset from the wheel center. Tire Role Defines tire function: front or rear. VARSUB Switch Activates the solver variables that contains the tire’s states. This option can be used for control prototyping. PIN Mode (For CD Tire only)
Defines the options in which inflation pressure is provided to CDTire. - File Extension
- Retrieve the inflation pressure from the extension of the file (example: 21MPa if the file name is tire_50.21).
- Tire Prop File
- Retrieve the inflation pressure from the data within the tire property file.
- Variable
- Retrieve the inflation pressure from the specified SolverVariable. This option is useful if you wish to have the inflation pressure varying as a function of another variable in the model, such as TIME for example.
PIN [MPa] (For CD Tire only)
Shows the inflation pressure when it is a constant value specified using either the “File Extension” or “Tire Property File”. Units: MPa
PIN [MPa] Collector (For CD Tire only)
Activates only when the "Variable" option is chosen for PIN Mode. Use this selector to specify the SolverVariable in the model that contains the pressure variation during the simulation.Note: You need to create this SolverVariable and specify the pressure function on it.Units: MPa
- Road Property File
-
Parameter Description Road Property File Property File option is used to browse and select the required road property file. Edit File Edit file button is used to edit the road property file and save the edited file. Method Defines the road model type. Road Type Defines the type of road. Function Name Name of the function being called by Solver.
Tire - Connectivity Section
| Connection | Significance |
|---|---|
| Hub Body | The wheel body on which the tire forces act. |
| Wheel Center | The point corresponding to the wheel center. |
| Tire Marker | The tire marker determines the direction in which the tire forces act. |
| Road Marker | The road marker, is the marker with respect to which the road is positioned and oriented for the simulation. |
Tire – Subroutines Definition
- Force Subroutine Input Parameters
-
The Tire force subroutine is defined in the cdtire.dll (.so) for the CD Tire case, and in mbdtire.dll (.so) for other Tire types. The function name is cdtire and mbdtire, respectively.
TNO, USER or CTI tire:
usrsub_param_str="USER(P1,P2,P3)"Parameter Description P1Branch ID: 908 (TNO, USER), 408 (CTI) P2Tire force ID P3Tire input array ID Force definition block in the xml:<!-- MODEL.tire_0.gf_tire_force --> <Force_Vector_TwoBody id = "30301" label = "Tire force" type = "ForceAndTorque" i_marker_id = "30301031" j_floating_marker_id= "30301034" ref_marker_id = "30101040" usrsub_param_string = "USER(908,30301,30300100)" usrsub_dll_name = "mbdtire" usrsub_fnc_name = "mbdtire" />CD Tire:
usrsub_param_str="USER(P1,P2,P3, P4,P5,P6,P7,P8,P9,P10,P11,P12,P13,P14,P15,P16)"Parameter Description P1Branch ID: 838 or 839 P2Tire force I Marker ID P3Rim X Marker ID P4Rim Y Marker ID P5Rim Z Marker ID P6Road Reference Marker ID P7CDTire control file solver string ID P8Tire property file solver string ID P9Road property file solver string ID P10Tire input array ID P11CDTire user road solver string ID / 0 P12CDTire Pin Mode solver string ID P13CDTire Pin Value solver string ID P14CDTire Pin Mode value P15All solver variables array ID P16CDTire type Force definition block in the xml:<!-- MODEL.tire_0.gf_tire_force --> <Force_Vector_TwoBody id = "30301" label = "Tire force" type = "ForceAndTorque" i_marker_id = "30301031" j_floating_marker_id= "30301034" ref_marker_id = "30101040" usrsub_param_string = "USER(839,30301031,30301020,30301030,30301040,30101040,303007,303001,303002,30300100,0,303008,303009,0,30300400,303010)" usrsub_dll_name = "cdtire" usrsub_fnc_name = "cdtire" /> - GSE Subroutine Input Parameters
- The Tire subroutine is defined only for TNO or USER tires in the
mbdtire.dll (.so). The function name is
GSESUB.
GSE subroutine input user string:
usrsub_param_str="USER(P1,P2,P3)"Parameter Description P1Branch ID: 908 P2Tire force ID P3Tire input array ID CSE definition block in the xml:<Control_StateEqn id = "305001" type = "USERSUB" x_solver_array_id = "30500200" y_solver_array_id = "30500300" u_solver_array_id = "30500100" ic_solver_array_id = "0" num_state = "5" num_output = "0" usrsub_param_string = "USER(908,30301,30300100)" usrsub_dll_name = "mbdtire" usrsub_fnc_name = "GSESUB" usrsub_der1_name = "GSEXX" usrsub_der2_name = "GSEXU" usrsub_der3_name = "GSEYX" usrsub_der4_name = "GSEYU" is_static_hold = "FALSE" /> - Variables Subroutine Input Parameters
- The Variable subroutine is defined in both mbdtire and
msautoutils
(.dll/.so). The function name for both
variable subroutines is VARSUB.
VARSUB definition in msautoutils:
usrsub_param_str="USER(P1,P2,P3, P4, P5, P6)"Parameter Description P1Branch ID: 907 (Calculate the direction cosines of the component vector (X, Y, Z) of marker I in the coordinate system of marker J) P2Marker I ID P3Marker J ID P4Marker J ID P5Vector component (1: X, 2: Y, 3: Z) P6Projected component of the direction cosines result (1,2,3) Variable definition block in the xml:<!-- MODEL.tire_0.sys_tire_states.sv_u_rim_x_dot_x --> <Reference_Variable id = "30500500" label = "X Disp - u_rim_x_dot_x" full_label = "Model-Tire 0-Tire States-X Disp - u_rim_x_dot_x" type = "USERSUB" usrsub_param_string = "USER(907,30301031,30101040,30101040,1,1)" usrsub_dll_name = "msautoutils" usrsub_fnc_name = "VARSUB" />VARSUB definition in mbdtire:
Branch 906:
usrsub_param_str="USER(P1,P2,P3, P4, P5)"Parameter Description P1Branch ID: 906 (Calculate the velocity of marker I with respect to marker J resolved in the coordinate system of marker K in the requested component.) P2Component (1: VX, 2: VY, 3: VZ, 4: WX, 5: WY, 6: WZ) P3Marker J ID P4Marker J ID P5Marker K ID Variable definition block in the xml:<!-- MODEL.tire_0.sys_tire_states.sv_u_rim_vx --> <Reference_Variable id = "30501100" label = "X Vel - u_rim_vx" full_label = "Model-Tire 0-Tire States-X Vel - u_rim_vx" type = "USERSUB" usrsub_param_string = "USER(906,1,30301031,30101040,30101040)" usrsub_dll_name = "mbdtire" usrsub_fnc_name = "VARSUB" />Branch 167:
usrsub_param_str="USER(P1,P2,P3)"Parameter Description P1Branch ID: 167 (Get the requested element from the tire force ID.) P2Tire force ID P3Requested element 0: Longitudinal slip
1: Lateral slip
2: Camber
3: Contact Patch Force -X
4: Contact Patch Force -Y
5: Contact Patch Force -Z
6: Contact Patch Moments -X
7: Contact Patch Moments -Y
8: Contact Patch Moments -Z
9: Rim Angular Velocity
10: Rim Longitudinal Velocity
11: Rim Vertical Velocity
12: Dynamic Rolling radius
13: Contact Patch Location -X
14: Contact Patch Location -Y
15: Contact Patch Location -Z
16: Wheel center location -X
17: Wheel center location -Y
18: Wheel center location -Z
19: Loaded radius
20: Tydex W origin - x
21: Tydex W origin - y
22: Tydex W origin - z
23: Tydex W to Global/road tramat
24: Tire Deflection
Variable definition block in the xml:<!-- MODEL.tire_0.sys_varsub.sv_long_slip --> <Reference_Variable id = "30400100" label = "Longitudinal Slip" full_label = "Model-Tire 0-VARSUB-Longitudinal Slip" type = "USERSUB" usrsub_param_string = "USER(167,30301,1)" usrsub_dll_name = "mbdtire" usrsub_fnc_name = "VARSUB" /> - Request Subroutine Input Parameters
-
The request subroutine is defined in the cdtire.dll (.so) for CD Tire case and in mbdtire.dll (.so) for the rest Tire types. The function name is reqsub for both cases.
usrsub_param_str="USER(P1,P2,P3)"Parameter Description P1Branch ID: 902 (TNO, USER or CTI), 839 (CD) P2Requested element See Coordinate Systems and Output Requests for additional information.
P3Tire force ID Request definition block in the xml:<!-- MODEL.tire_0.o_rolling_states --> <Post_Request id = "70000007" label = "Tire 0 - Radius OmegaActual OmegaFree" comment = "Tire 0 - Radius OmegaActual OmegaFree" type = "USERSUB" usrsub_param_string = "USER(902,1,30301)" usrsub_dll_name = "mbdtire" usrsub_fnc_name = "reqsub" cname2 = "Radius" cname3 = "Omega-actual" cname4 = "Omega-free" />