Structure for receiver configuration if point mode is on.
Orientation of Angles
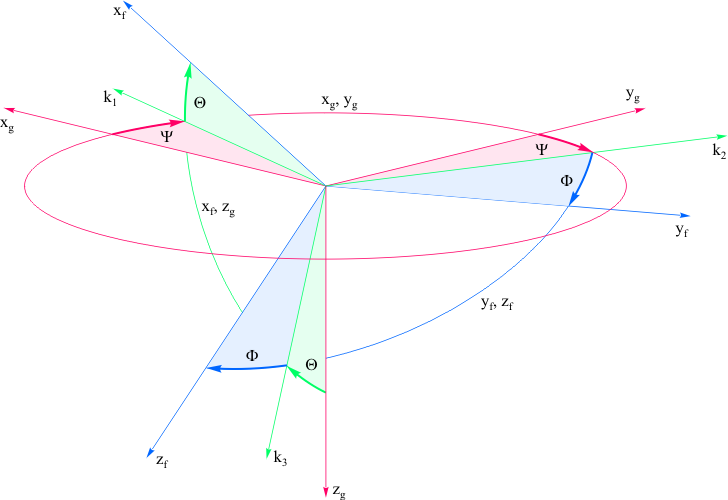
The orientation of the angles and the transformation from the world frame into the body frame of the receiver is as follows:
Yaw angle (heading): Psi
Pitch angle (inclination angle): Theta
Roll angle (bank angle): Phi
In the following index g means global (world) frame and index f means body frame.
Rotate the XYZ-system about the z-axis (zg-axis) by Psi. x-axis (xg-axis) is now k1 and y- axis (yg-axis) is now k2.
Rotate the XYZ-system about the now rotated y-axis (k2-axis) by Theta. k1-axis is now xf-axis and zg-axis is now k3-axis.
Rotate the XYZ-system a third time about the new x-axis (xf-axis) by Phi. k2-axis is now yf- axis and k3-axis is now zf-axis.
Thus the sequence of rotation is: Psi > Theta > Phi
Figure 1. Sequence of rotations: zg - k2 - xf
Trajectory definition in case of moving receiving antenna along a trajectory. (only in case of indoor time-variant scenarios).
PointSize
double WinProp_Receiver::PointSize
Size of the point, needs to be identical for all points provided to WinProp_Predict_Points. Defines resolution of prediction grid for DPM. For other propagation models it has only visual impact.
ReceiverMode
int WinProp_Receiver::ReceiverMode
Receiving point mode
0 = Represents a prediction point
1 = Represents a repeater antenna
2 = Represents a user
3 = Represents a reference point
The documentation was generated from the following file: