Snap Fit
![]()
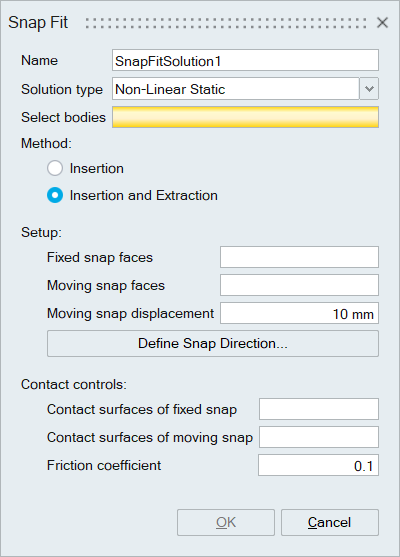
Outcome:
The outcome of the snap fit simulation is to compute the insertion and extraction force required for snap in and snap out.
Snap fit analysis can be simulated with following analysis types for OptiStruct:
- Non-Linear static
- Non-Linear transient
- Explicit Dynamic
Users can create a quick simple snap fit solution by selecting the methods that are needed to be simulated.
Two methods can be simulated:
- Insertion
- Non-Linear Static and Non-Linear Transient: Insertion will be done in loadcase.
- Explicit Dynamic: Insertion will be done in no loadcase mode.
- Insertion and Extraction
- Non-Linear Static and Non-Linear Transient: Insertion and Extraction will be done in different loadcases.
- Explicit Dynamic: Insertion and Extraction will be done in no loadcase mode in same solution.
Assumption:
- The boundary condition involves simple translations that are required for snap-in and snap out.
- Snap fit involving rotational movements or other motion definitions must be created by user, reusing the same solution.
Boundary conditions of snap fit:
- Faces of fixed snap body and moving snap body are used to create fixed constraint boundary condition and is applied on RBE primary node created from fixed and moving snap faces.
- Snap displacement magnitude and direction is applied on the moving snap RBE primary node as enforced displacement.
- Explicit Dynamic: As Explicit dynamic is simulated in no loadcase approach, The insertion and extraction are specified using time dependent amplitude table for enforced constraint.
Contact Conditions for Snap fit:
- Non-Linear static and Non-Linear Transient: Users can create continuous sliding with friction contact.
- Specify the surfaces from fixed snap and moving snap that will undergo contact.
- Specify the friction coefficient between fixed and moving snap surfaces.
- Sliding with friction contact will be created.
- Explicit Dynamic: Users can create General contact or sliding with friction contact.
Solver Settings and Output Requests:
| Solution type | Solver Settings | Output Request | ||
|---|---|---|---|---|
| Insertion | Extraction | Insertion | Extraction | |
| Non Linear Static |
|
|
|
|
| Non Linear Transient |
|
|
|
|
| Explicit Dynamic |
|
Number of output intervals (NLOUT) requested is 10. | ||