Transient Magnetic solution
![]()
Introduction
The Transient Magnetic application allows the study of the phenomena created by a time variable magnetic field. The magnetic field is related to the presence of variable currents (and possibly permanent magnets).This application allows the consideration of induced currents in conducting regions (Eddy currents). It also allows the consideration of skin effects and proximity effects in the conducting regions.| 2D | 2D with skewed Motor |
|---|---|
| 3D | AxiSymmetric |
|---|---|
The Transient Magnetic application can be used for different types of devices. We are principally interested in the study of devices supplied by current of varied shape (echelon, trapezoid…) or by transient phenomena (linked to current variation caused by powering, short circuits…)
The Transient Magnetic application is principally used with Circuit coupling and/or Kinematics coupling for rotating machines, transformers, etc. study in transient state.
- 2D Transient Magnetic (2D and AxiSymmetric solutions have the same workflow)
- 3D Transient Magnetic
Solution dialog box
- The transient solution is available for 2D, AxiSymmetric and 3D cases
- In case of 2D the domain depth must be defined to consider the electromagnetic effects in the third dimension
- In the case of transient magnetics, the user has a choice to select the driving transient variable or the control parameter. This can be in the general case Time or in the case of rotational motion (in the case of e-motors for example), the transient variable can be defined in terms of Angular position that defines the rotation or in the case of linear motion (for a linear actuator for example), the transient variable can be defined in terms of Linear position that defines the translation.
- The control parameters (Time or Angular position or Linear position) can be
defined by several Control type:
- By step value
- Max time
- Time step
Example: Max time = 5s, Time step = 1s → The list of step will be 0s - 1s - 2s - 3s - 4s - 5s
- By step number (linear)
- Max time
- Number of steps
Example: Max time = 10s, Number of steps = 6 → The list of step will be 0s - 2s - 4s - 6s - 8s - 10s
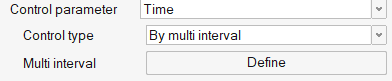
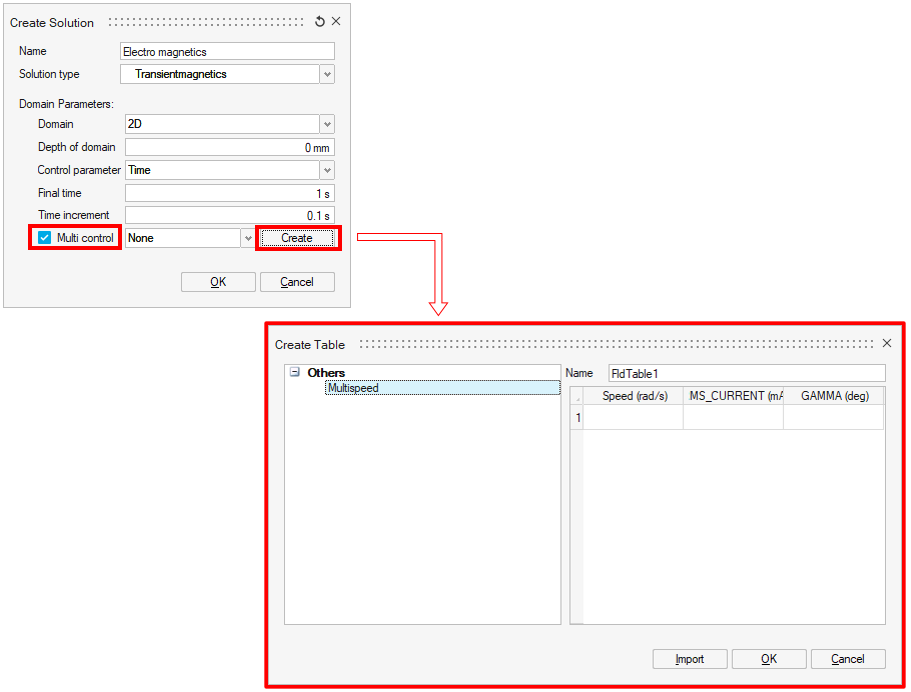
- By step list: choose a table already existing
or create a table by clicking on Create
- By multi interval: click on Define to
open the Define a multi interval scenario
dialog
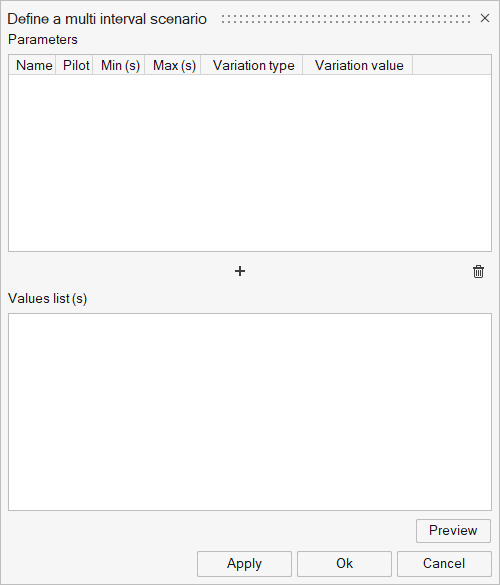
You have the possibility to define several interval using different Variation type (Step value, step number (linear), step number (logarithmic), step list).
To create multi intervals:
- click on "+" symbol
- choose the variation type
- enter the corresponding fields (Min, Max and Variation value)
- click on Preview to see the list of
values
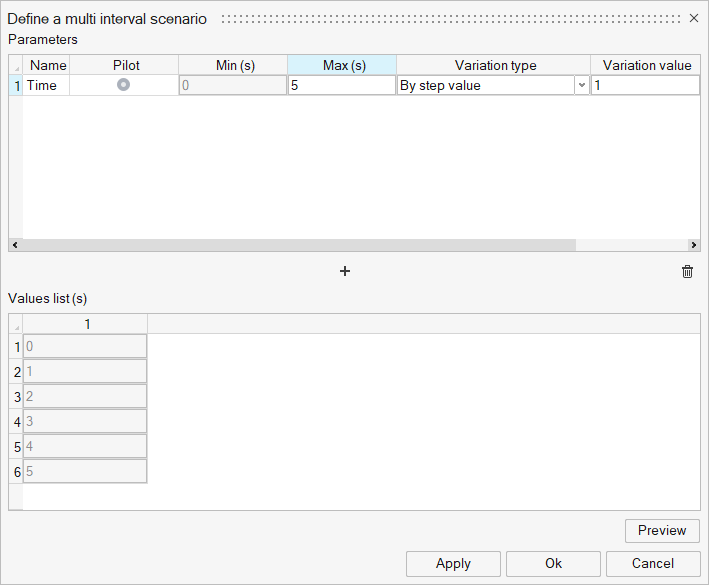
- click on "+" symbol to add another
interval
→ The Min value is automatically set by the Max value of the preview interval
- choose the variation type
- enter the corresponding fields (Max and Variation value)
- click on Preview to refresh the list
of values
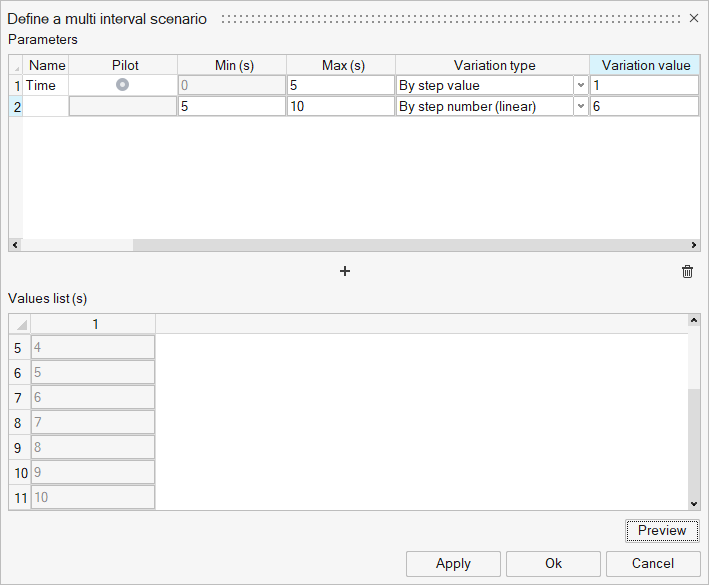
- Add another interval or click on OK to validate the multi interval
CAUTION: With the control of the position the Min value must be the same as the initial position set in the Motion LBC.Note: The Angular position and Linear position control parameters are not compatible with all Motion types. For more information, please refer to Motion - By step value
-
Specifically for the case of e-motors (only in 2D at this time), users can define multi-control to simultaneously calculate multiple working points defined by current, control angle and speed.
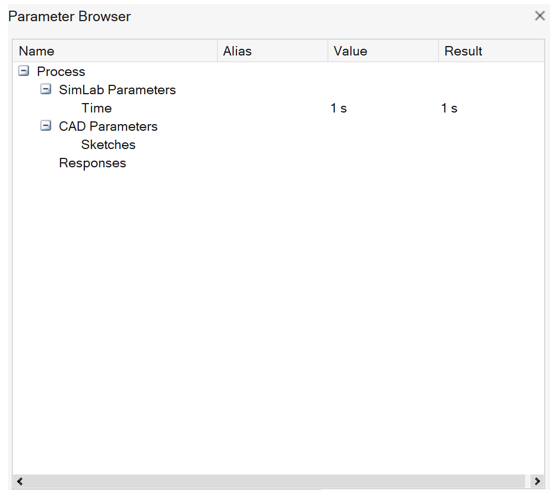
Automatic parameter creation
- Creation of the transient magnetic solution now automatically creates a
variable Time
The creation of this parameter is reflected in the output window.
This parameter can be used to define transient quantities like current or voltage waveforms eg. I1 = MAX_CURRENT*SIN(OMEGA*Time+Gamma*PI/180).Note: The parameter does not reflect the actual values defined in the solution but only default values. - Creation of the the motion load named for instance Motion_1 now
automatically creates three variable:
- Angular_Position_Motion_1
- Angular_Speed_Motion_1
- ElecMag_Torque_Motion_1
- Creation of the multi control solution, by defining multiple working points
creates the parameters RMS_Current,
Speed and Gamma in
addition to the Time parameter
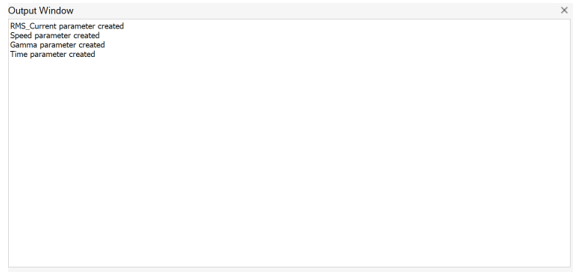
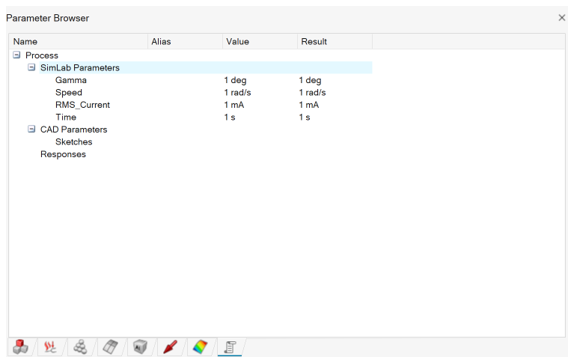
Note: The parameters do not reflect the actual values defined in the solution but only default values.
Typical examples
- Typical example of a transient magnetic problem is shown below for a passive
conductor which is not circuit linked.

air or vacuum 

magnetic environment
(non conducting)

conducting environment
(non magnetic) without Eddy current

conducting environment (magnetic or not) with possible Eddy current -
Another example where the conductors are linked to an external circuit.
air or vacuum 
magnetic environment
(non conducting)
conducting environment
(non magnetic) without Eddy current
conducting environment (magnetic or not) with possible Eddy current