Reference Frame
![]()
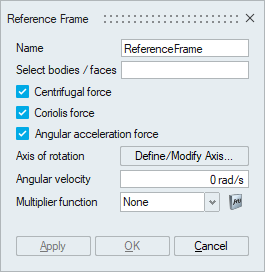
This option is used to define rotational frame of reference for selected bodies or faces. When the reference frame is applied, the bodies are solved in the given rotating reference frame and rotational body forces are added to them. When reference frame is applied to a face, the velocity vector is transformed appropriately before the boundary condition is applied.
The rotational body forces are known as the centrifugal, Coriolis, and angular acceleration forces.
Description
- Select bodies/faces
Select the bodies or faces to which the reference frame needs to be specified.
- Centrifugal force
Centrifugal force is an apparent force that acts outward on a body moving around a center, arising from the body’s inertia.
- Coriolis force
Coriolis force is an inertial or fictitious force that acts on objects that are in motion within a frame of reference that rotates with respect to an inertial frame.
- Angular acceleration force
Angular acceleration refers to the time rate of change of angular velocity. Angular acceleration force is the force applied on a body that induces angular velocity.
- Axis of rotation
Select Define/Modify Axis to specify the axis of rotation. In the Define Axis panel, any of the displayed options can be used to define axis of rotation.
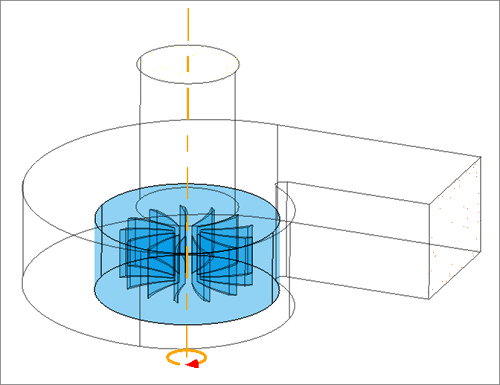
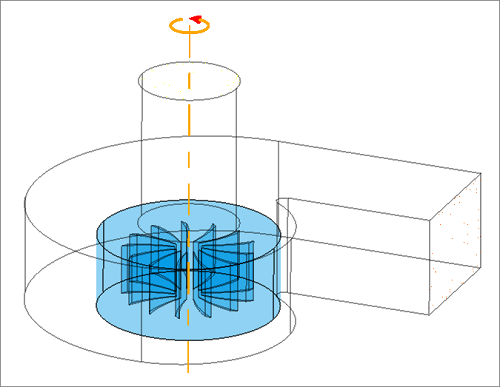
The Reverse axis option is used to reverse the direction of rotation of a body.
Dialog Box Image 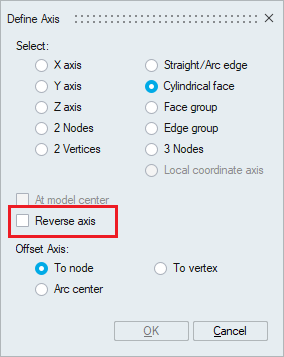
- Angular Velocity
Angular velocity is the rotational velocity of the body and is defined as the ratio of the tangential velocity and the radius of the component. The units in MKS is radian/second. If the value is known in units other than MKS, the value can be specified with the units and it will be converted to MKS automatically. For example, when 300 rpm is typed instead of 31.4159 rad/sec, then the value will be automatically converted into rad/sec.
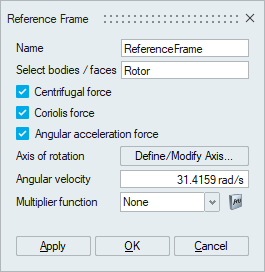
- Multiplier Function
The multiplier function can be used to provide inputs that vary with time.