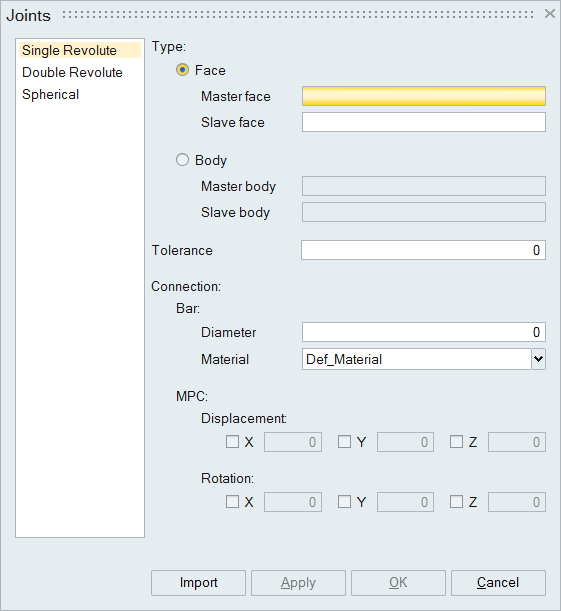
Joints
![]()
Description
The following joints can be modelled
- Single revolute joint
- Double revolute joint
- Spherical joint
- Planar/Cylindrical glue joint
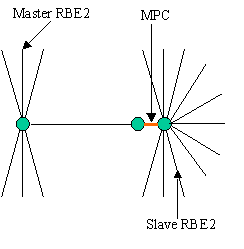
Joints can be modelled by selecting one face each from both master and slave body ("Face Based") or by directly selecting master and slave body ("Body Based"). Face from cylindrical faces of joint is to be selected for Face Based option. All other connected cylindrical faces will be identified automatically to model the joint. Body Based option will identify the matching coaxial cylinders and create joints. Revolute joints and spherical joints are modelled by creating master and slave RBE2 connected through bar and MPC.
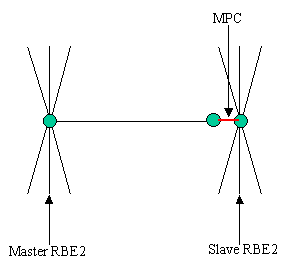
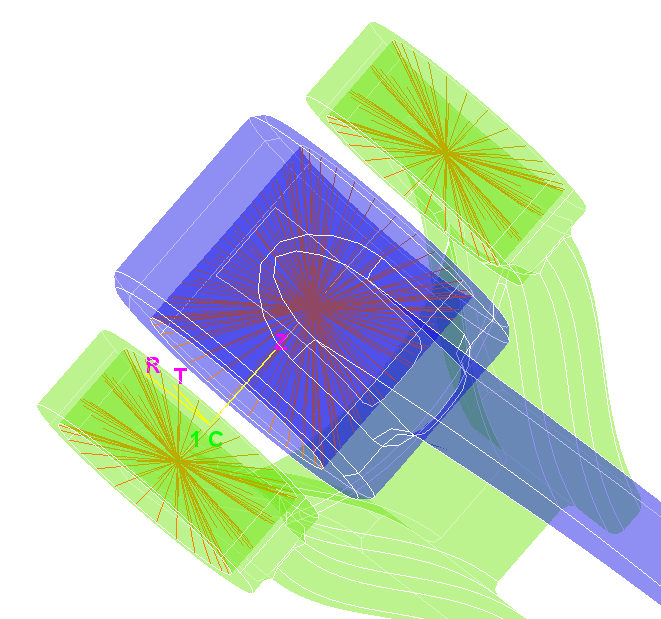
Single revolute joint
Center node of master RBE2 of single revolute joint is connected to the bar and other end of bar is connected to center node of slave RBE2 through MPC with respect to local coordinate system having z axis through the axis of joint.
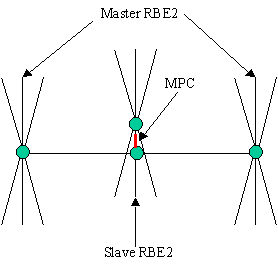
Double revolute joint
Center nodes of master RBE2 will be connected by 2 bar elements and the master node of slave RBE2 will be connected to the bar through MPC with local coordinate system having z axis through the axis of joint.
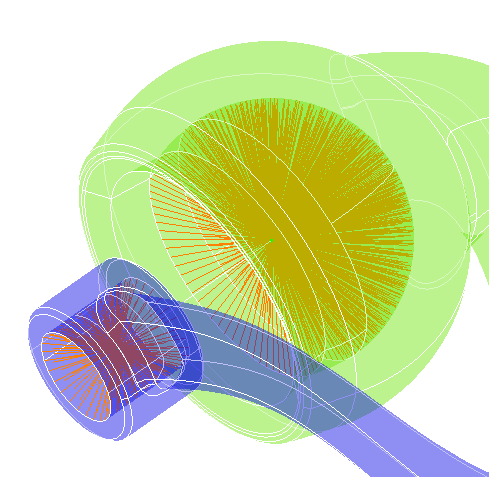
Spherical joint
Center node of master RBE2 of spherical joint is connected to the bar and other end of bar is connected to center node of slave RBE2 through MPC with respect to global coordinate system. The physical position of the center node of slave RBE2 is to be defined by the user. Selecting slave face is only to identify the slave body, therefore user can select any from slave body.
Joints can be imported directly from file by defining the body name and type ot joint. The keyword JOINT followed by other parameter define one joint.
Keywords to define joint
JOINT - Type of joint
MASTER - Name of master body
SLAVE - Name of slave body
TYPE - Type for MPC joint
ELEMENT_TYPE - Type of element for MPC joint
AXIS - Reference axis for MPC for MPC Joint
JOINT_FACES - Type of face of joint for MPC joint
FRICTION - Value for friction
TOLERANCE - Tolerance to identify matching faces for MPC Joint
DISPX - X displacement degrees of freedom for MPC
DISPY - Y displacement degrees of freedom for MPC
DISPZ - Z displacement degrees of freedom for MPC
ROTX - X rotation degrees of freedom for MPC
ROTY - Y rotation degrees of freedom for MPC
ROTZ - Z rotation degrees of freedom for MPC
RADIUS - Radius of bar
CENTERX - X abscissa for master node of slave RBE2 of spherical joint
CENTERY - Y abscissa for master node of slave RBE2 of spherical joint
CENTERZ - Z abscissa for master node of slave RBE2 of spherical joint
MATERIAL - Name of material for bar body
List of arguments to define each keywords for joints
JOINT = MPCGLUE_JOINT/SINGLE_REVOLUTE/DOUBLE_REVOLUTE/SPHERICAL
MPCGLUE_JOINT - MPC joint
SINGLE_REVOLUTE - Single revolute joint
DOUBLE_REVOLUTE - Double revolute joint
SPHERICAL - Spherical joint
TYPE = GLUE/SLIDER/GAP
ELEMENT_TYPE = RBE2/RBE3
JOINT_FACES = planar/Cylindrical/All
planar - Planar contact faces will be considered for MPC joint
Cylindrical - Cylindrical contact faces will be considered for MPC joint
All - Both cylindrical and planar faces will be considered for MPC joint
Sample File Definition
#Line starts with # is comment line
JOINT = MPCGLUE_JOINT
MASTER = Case
SLAVE = Bearing
TYPE = glue
ELEMENT_TYPE = rbe3
AXIS = GLOBAL
JOINT_FACES = all
FRICTION = 0.
TOLERANCE = 0.1
DISPX = 0
DISPY = 0
DISPZ = 0
ROTX =
ROTY =
ROTZ =
#****************************************
JOINT = SINGLE_REVOLUTE
MASTER = Case
SLAVE = Lever
MATERIAL = steel
DISPX = 0
DISPY = 0
DISPZ = 0
ROTX =
ROTY =
ROTZ =
TOLERANCE = 2
#****************************************
JOINT = DOUBLE_REVOLUTE
MASTER = Case
SLAVE = Lever
MATERIAL = steel
DISPX = 0
DISPY = 0
DISPZ = 0
ROTX =
ROTY =
ROTZ =
TOLERANCE = 2
#*****************************************
JOINT = SPHERICAL
MASTER = Case
SLAVE = Lever
MATERIAL = steel
CENTERX = 0
CENTERY = 0
CENTERZ = 0
RADIUS =
ROTY =
ROTZ =