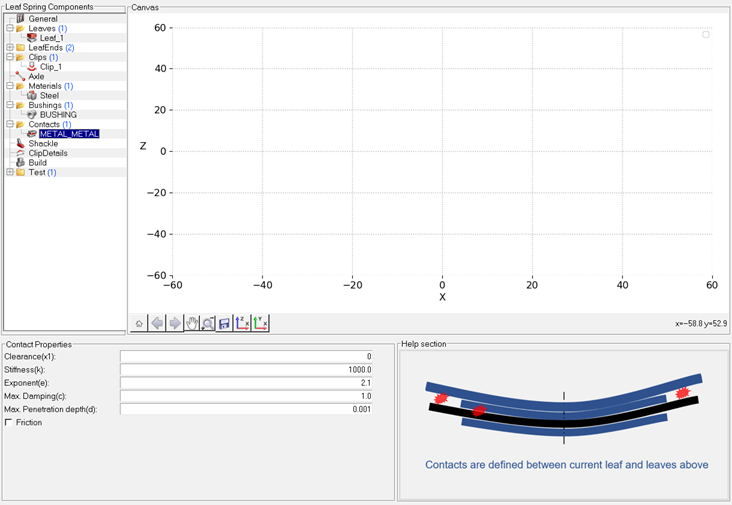
The Contacts component is required to define the options in the Contact Properties
section for inter-leaf contacts.
METAL_METAL is the default contact. You can add
any number of contacts based on the requirement.
The contact force is modeled as an
Impact function:Figure 1.
Note: For more information about impact, see the MotionSolve documentation on the IMPACT
function.
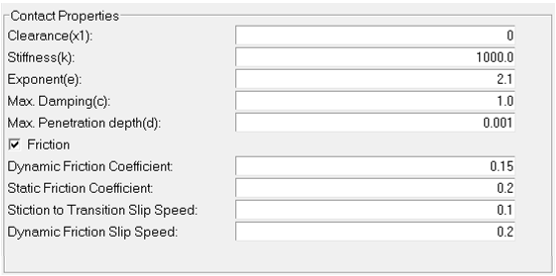
Figure 2. Contact Properties
Contact Properties
The following section
explains the options used in Contact Properties.
Clearance
Minimum distance above which no contact force will be applied. It is used to
define spacer thickness.
Stiffness
Defines the stiffness of the contact force.
Exponent
Defines the exponent of the force deformation characteristic.
Max. Damping
Defines the maximum damping coefficient.
Max. Penetration Depth
Penetration at which the full damping coefficient is applied.
Friction
Friction data is required only if
you select the friction option. It is used for the contact forces in constructing the
leaves. The Coulomb model of friction calculates the friction force as the normal force
multiplied by the coefficient of friction. This coefficient is calculated as a function
of the slip velocity. It does not support stiction. The following explains the
parameters used in the Friction option:
Dynamic Friction Coefficient
Defines the coefficient of friction when the slip velocity is greater than
the dynamic friction slip speed.
Static Friction Coefficient
Defines the coefficient of friction when the slip velocity is less than the
stiction transition slip speed.
Stiction to Transition Slip Speed
Defines the value at which full value of static friction coefficient is used
as coefficient of friction.
Dynamic Friction Slip Speed
Defines the value at which full value of dynamic friction coefficient is
used as coefficient of friction.
Figure 3. Contact Properties Options
Contact Properties for Leaf Property File
(*lpf)
In the Contact Properties block of Leaf Property file, the attribute,
type, and valid value that has to be entered in TiemOrbit file format are detailed in
the following table. This table also provides information about the mandatory
requirements for attributes.
An example of how an Contact Properties block is
represented in a TiemOrbit file format is shown below: