Reduced Motor Model
![]()
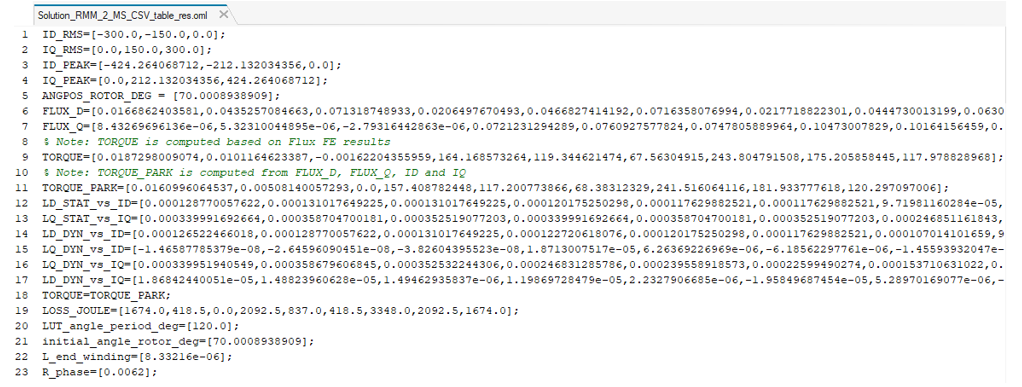
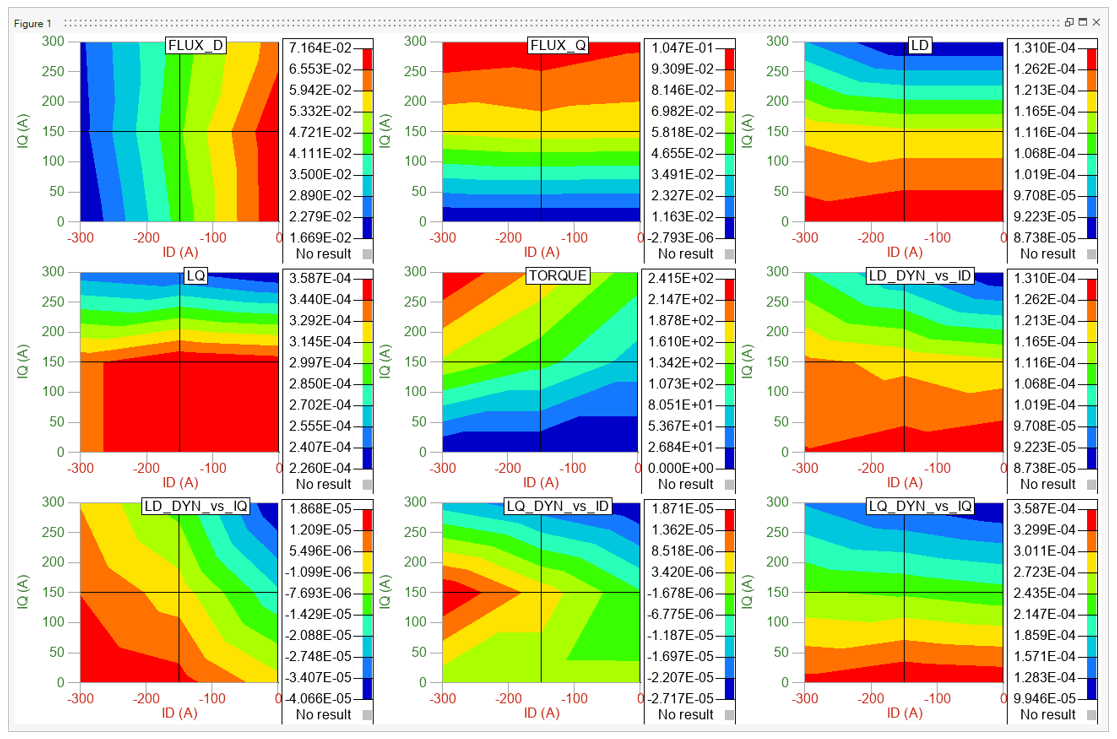
This application computes look-up tables of Fluxdq, Ld, Lq (static and dynamic), iron losses, Joule losses and torque versus Id, Iq and rotor position (if needed).
You will have to fullfil the next screenshot.
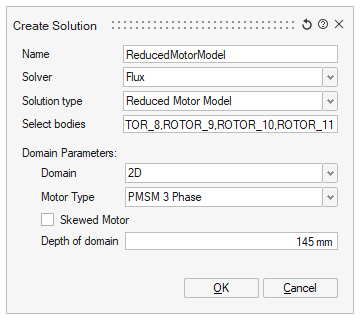
You can modify the Name of the new solution to be created. You can assign bodies to this solution in the Select bodies part. And you will need to define the Depth of domain. The other fields are currently fixed.
Park equation standard method (amplitude invariant) is used here, linking current in abc frame to current in the dq0 frame:


This formulation defines the torque as:

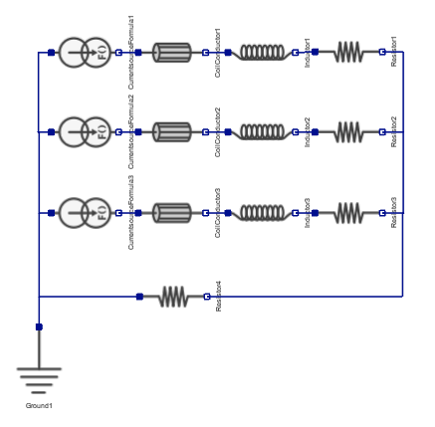
Initial project must be a Transient Magnetic model of your motor with 3 current sources and a "sliding" mechanical set for the rotating part.
Solver Settings for this solution are current and position range for the look up table computation. The number of values for Id is for 4 quadrants, so setting 5 values on 1 quadrant will generate a vector of ID that has 3 values.
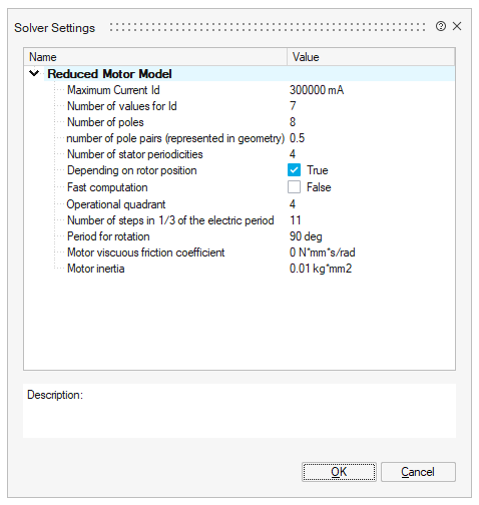
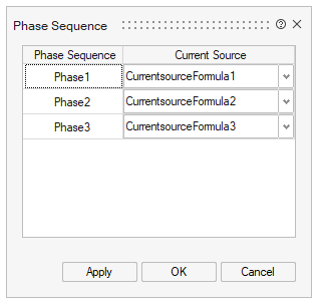
If you select the rotor position dependency, the first value of the rotor position vector will be the position where the rotor flux is aligned with the reference phase given in the Phase Sequence box. Without rotor position dependency, only this position will be computed and there won’t be iron losses.
These results can be used to model the motor in a system schematic (like with Activate or PSIM for instance). The Transient Magnetic project is converted to Magnetostatic which phase currents are driven with Id and Iq allowing to extract easily all the needed tables.
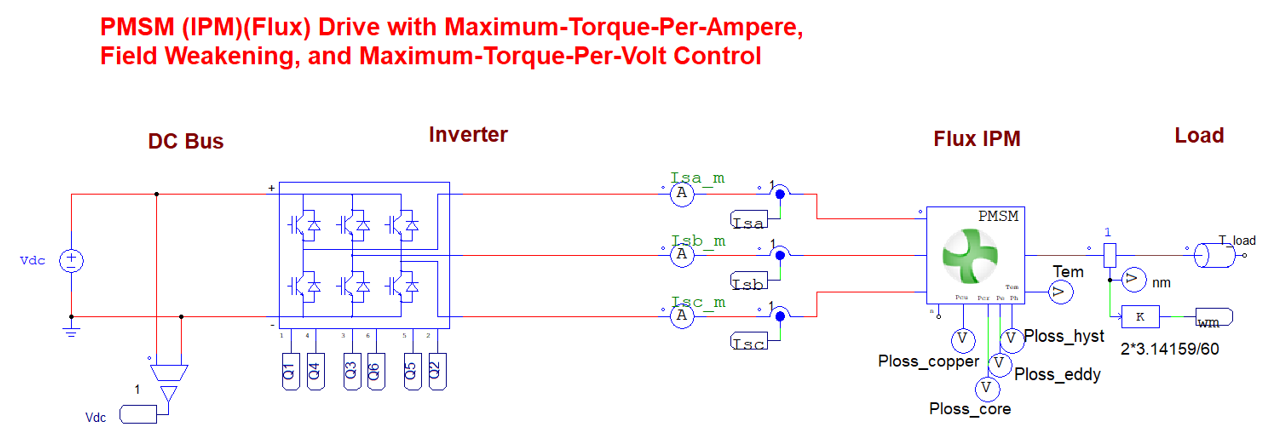
Outputs are stored in a mat file that can be read by Compose, Activate or PSIM. Furthermore, look-up table curves are displayed in Simlab.
Look-up tables can be used to obtain currents resulting from a PWM driver in PSIM, and re-import them in Simlab to compute the harmonic effects on CFD or NVH of your motor.
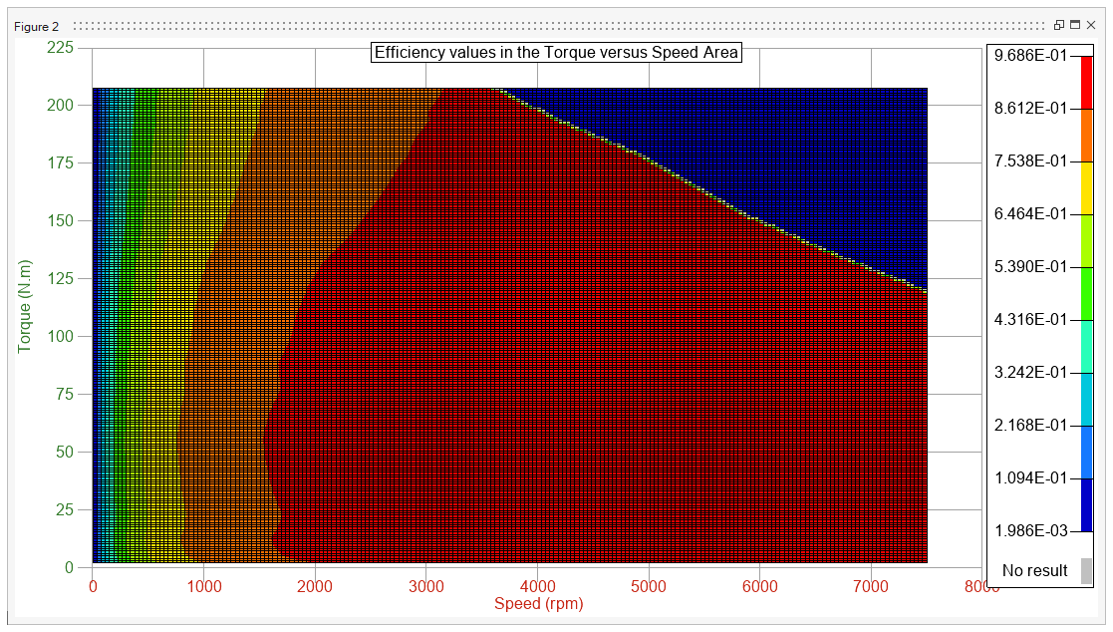
It can also be used to obtain efficiency maps using Compose.