
RD-E: 0202 Implicit Example
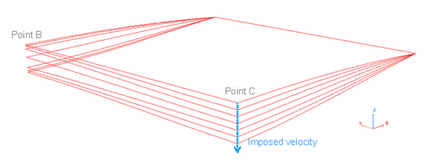
A shallow cylindrical roof upon which an imposed velocity is applied at its mid-point. Analysis uses an implicit approach.
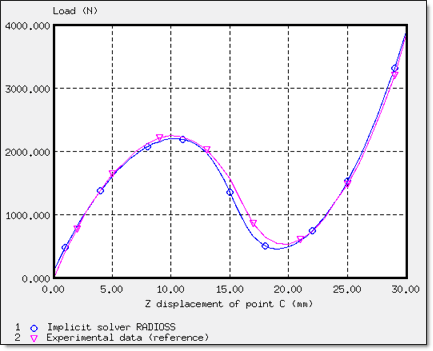
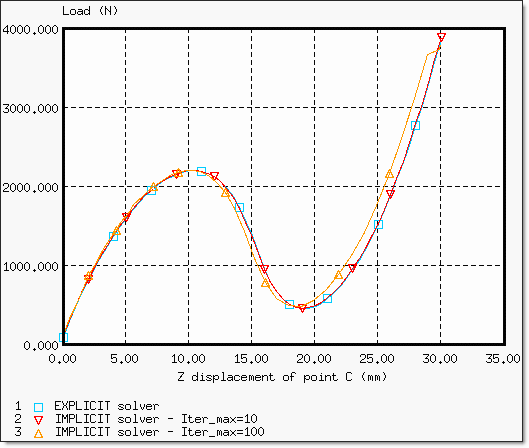
The purpose of this example is to study a snap-thru problem with a single instability. Thus, a structure that will bend when under a load will be used. The results are compared to a reference solution. 1 An implicit strategy using an arc-length method is illustrated.
Options and Keywords Used
- Implicit solver, time step control by arc-length method
- Static nonlinear analysis
- Stability, snap-thru, and limit load
- T3 Shell
- Boundary conditions (/BCS)
- Implicit options (Implicit Solution)
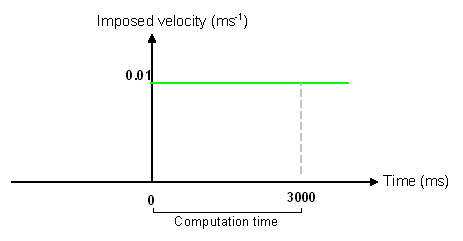
- Imposed velocity (/IMPVEL)
- Rigid body (/RBODY)
The limit point causes major nonlinearities. Therefore, a static nonlinear analysis is performed using the arc-length displacement strategy. The time step is determined by a displacement norm control. In order to exceed the limit point characterized by a null tangent on the load displacement curve and to describe the increasing and decreasing parts of the nonlinear path, a small time step is required, which is ensured by setting a maximum value.
- Linear Implicit Options
- Linear solver
- Direct solver MUMPS
- Precondition methods
- Factored approximate Inverse
- Maximum iterations number
- System dimension (NDOF)
- Stop criteria
- Relative residual in force
- Tolerance for stop criteria
- Machine precision
- /IMPL/PRINT/NONL/-1
- Printout frequency for nonlinear iteration
- /IMPL/SOLVER/2 5 0 0 0.0
- Solver method (solve Ax=b)
- /IMPL/NONLIN 3 1 0.20e-3
- Static nonlinear computation
- /IMPL/DTINI 10
- Initial time step determines the initial loading increment
- /IMPL/DT/STOP 0.5 10
- Min Max values for time step
- /IMPL/DT/2 6.0 20 0.8 1.05
- Time step control method 2 - Arc-length+Line-search will be used with this method to accelerate and control convergence
Refer to Radioss Starter Input for more details about implicit options.
Model Description
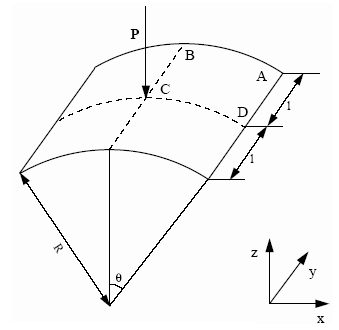
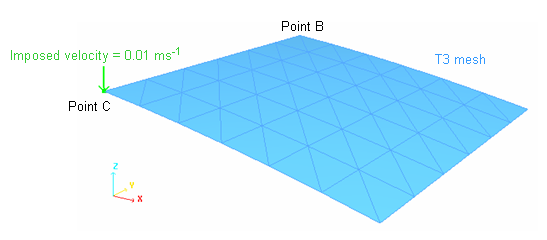
A shallow cylindrical roof, pinned along its straight edges, upon which an imposed velocity is applied at its mid-point.
Units: mm, ms, g, N, MPa
- l
- 254 mm
- R
- 2540 mm
- Shell thickness
- t = 12.7 mm
- 0.1 rad
- Material Properties
- Value
- Initial density
- 7.85x10-3
- Young's modulus
- 3102.75
- Poisson ratio
- 0.3
Model Method
The modeling problem described in the explicit study remains unchanged.
Results
Curves and Animations
Only a quarter of the total load is applied due to the symmetry. Thus, force Fz of the rigid body as indicated in the Time History must be multiplied by 4 in order to obtain force, P.
Implicit and Explicit Comparison Results
| Implicit Solver | Explicit Solver | |
|---|---|---|
| Normalized CPU | 1 | 2.45 |
| Cycles (normalized) | 1 | 237 |
In comparison with the implicit computation, which uses a maximum time step of 10 ms, the saved CPU time using a maximum time step fixed at 100 ms, approximately corresponds to factor 4.