RD-E: 1500 Gears
The purpose of this study is to demonstrate the use of quadratic interface contact using two gears in contact with identical pitch diameter and straight teeth. Two different contact interfaces are compared.
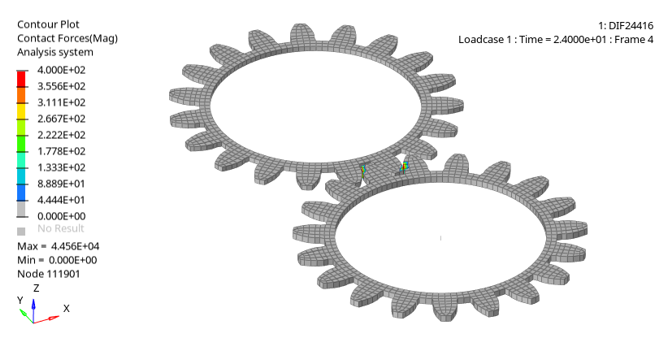
Figure 1.
Options and Keywords Used
- /BCS
- Defines boundary conditions on node groups for translational and rotational motion.
- /BRICK20
- Describes 3D solid elements (20 node brick elements).
- /IMPVEL
- Defines imposed velocities on a group of nodes.
- /INIVEL/AXIS
- Initialize both translational and rotational velocities on a group of nodes in a given coordinate system.
- /INTER/TYPE16
- Simulates the impact between nodes and external surfaces of brick.
- /INTER/TYPE17
- Simulates the impact between external surfaces of two brick groups.
- /SHEL16
- Describes the 3D shell elements (16 node thick shell elements).
Input Files
Model Description
The gear system is turning with a constant acceleration ( = 2.0e-6 rad/ms2).
The acceleration is applied to one gear. It is assumed that the contact between the teeth does not generate any friction.
- Material Properties
- Value
- Young's Modulus
- 210000
- Density
- 7.8x10-03 g/mm3
- Poisson's ratio
- 0.29
- Number of teeth
- Z =19
- Diametric pitch
- P = 1/mo= 1/40
- Pressure angle
- ao= 20 degrees
- Parameters
- Value
- Pitch diameter
- Dp = mo* Z, then Dp = 760 mm
- Root diameter
- Db = mo* cos(ao), then Db = 714.17 mm
- Addendum
- ha = mo, then ha = 40 mm
- Dedendum
- hf = 1.25 * mo, then hf = 50 mm
- Circular pitch
- p = PI * mo, then p = 125.66 mm
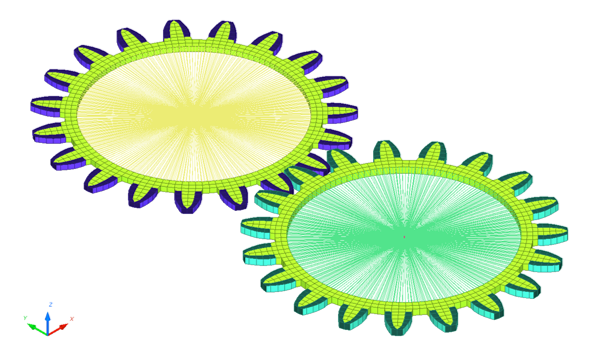
Figure 2. Global View of the Mesh
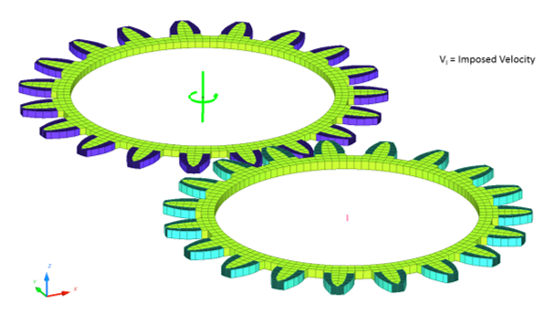
Figure 3. Imposed Velocity on the Rigid Body Main Node
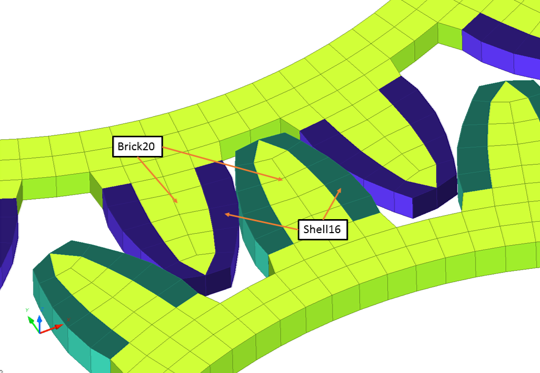
Figure 4. View of the Teeth
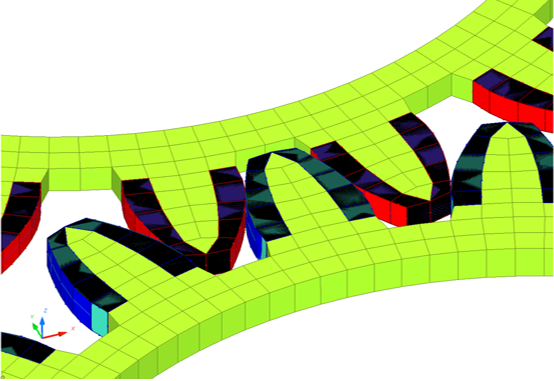
Figure 5. Contact Modeling between Quadratic Surfaces (TYPE 16/17 Interfaces)
Results
Time History Results
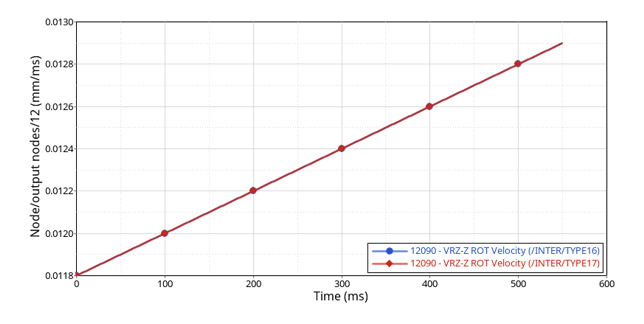
Figure 6. Imposed Rotational Velocity Curves
Conclusion
Both interfaces provide overall satisfactory results for this kind of application where the contact surfaces are complex and there is no gap. Since these contacts use Lagrange multiplier kinematical conditions, they only work with SMP parallelization which is limited to fewer CPUs compared to Hybrid and SPMD parallelization. For larger models, penalty contacts TYPE24 and TYPE25 work better for solid elements with no contact gap.