Design Variables
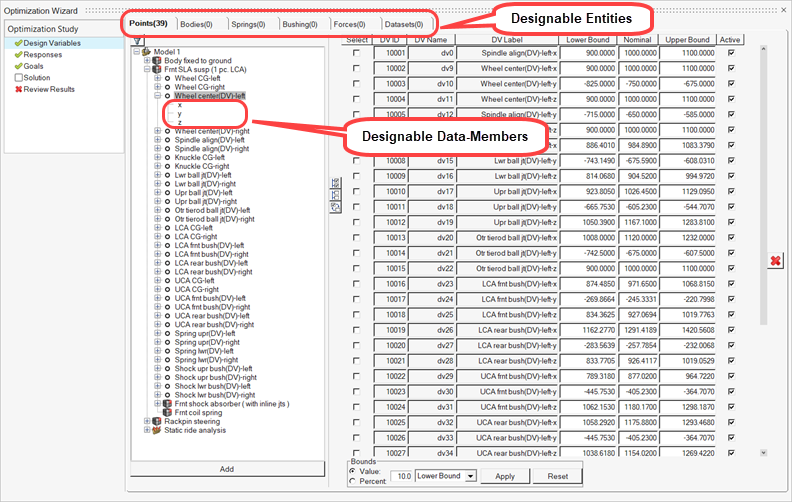
The first step in the Optimization process is to identify the Design Variables (DVs) in your model.
| Designable Entities | Designable Data-Members |
|---|---|
| Points | x, y, z (Coordinates) |
| Bodies (Rigid Bodies and Point Masses) | mass, Ixx, Iyy, Ixy, Ixz, Iyz (Mass and Inertias) |
| SpringDampers | k, kt, c, ct, f, t, len, ang (Stiffness, Damping, Preload and Free Length) |
| Bushings | kx, ky, kz, ktx, kty, ktz, cx, cy, cz, ctx, cty, ctz, fx, fy, fz, tx, ty,
tz (Stiffness, Damping, Preload) |
| Forces | Fx, Fy, Fz, Tx, Ty, Tz, F, T (Components) |
| Datasets** | value (Real) |
MotionView supports expression-based, parametric definitions wherein new quantities can be defined using existing quantities, free parameters (to be defined later) and expressions. A dependent quantity (that is defined parametrically in terms of other quantities) cannot be defined as a DV. Only quantities that are “independent” can be selected as DVs.
- Sphere mass:

- Sphere inertia:

Once DVs are added, you can modify or remove existing DVs at any time in the definition of the Optimization Study.