The Hysteretic Spring contact model allows plastic deformation behaviors to be
included in the contact mechanics equations, resulting in particles behaving in an elastic
manner up to a predefined stress.
Once this stress is exceeded, the particles behave as though undergoing plastic
deformation. The result is that large overlaps are achievable without excessive
forces acting upon them, thus representing a compressible material. Hysteretic
Spring normal force calculation is based on the Walton-Braun theory described in the
works of Walton and Braun (Walton and Braun
1986), (Walton and Braun 1986).
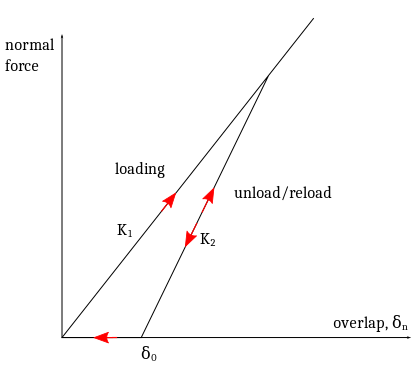
The following figure describes the Hysteretic Spring contact model force displacement
relationship.
Note: The unloading force goes to
zero before the displacement recovers to the initial contacting
point.
The quantity δ0 represents the residual ‘overlap’ that remains because of
the plastic deformation - flattening in the contact region. The exact location of
each old contact spot is not ‘remembered,’ so that particles become like new
undeformed spheres once they separate. Subsequent contacts will load along a new
loading path with slope, K1. Any reloading before separation follows the
slope K2 until the original loading curve K1 is reached, whereupon the
lower slope is followed until unloading occurs.
The normal force, FN, is defined as:
Where K1 and K2 are the loading and unloading stiffness
respectively, δn, is the normal overlap and δ0 is the residual
overlap. Loading stiffness, K1, is related to the yield strength of each
material participating in contact, Y1 and Y2, as follows
(Walton O.,
2006) in:
Here, R* is the equivalent radius of the two particles participating in
the contact. The Coefficient of Restitution is defined as:
This allows for the determination of K>2 from K1 (Walton O. ,
2006). Residual overlap is updated every Time Step according to the
following rule:
The main energy dissipation mechanism is due to the difference in spring stiffness
between loading and unloading phases. The need for an additional velocity dependent
dissipation mechanism, to suppress possible undamped low amplitude oscillations, was
suggested in (Walton O. , 2006). In EDEM's Hysteretic
Spring model, this mechanism was implemented in a way similar to the linear spring
normal damping force scaled by a dimensionless user set parameter Damping Factor,
bn, as follows:
Here k is either K1 or K2. The rest of the variables and
factors in the above expression are explained in the Linear Spring contact model
section.
Since the Hysteretic Spring model for normal force can be considered as an extension
of the Linear Spring model for normal force, it is recommended to use tangential
components of the Linear Spring model for tangential forces. In particular, a more
general form of the Linear Spring Elastic tangential force is used in the Hysteretic
Spring model in which the force depends on the user-defined stiffness factor,
γt, as follows:
As opposed to the normal component, the tangential damping force is not scaled by the
damping factor.
For particles, a default value for the Yield Strength is estimated from the Young’s
Modulus E and Radius of the particle R according to the algorithm suggested in
(Walton O. ,
2006). Initially, the possible default value is calculated as
follows:
If this value is less than 100Pa, it is replaced with a value of 0.003 *E.
For Geometries, the default value is set to 1e+09 Pa.