The Hertz-Mindlin with JKR Version 2 (JKR V2) model captures the behavior of
multiple materials and uses a more accurate implementation of the JKR theory.
The Johnson-Kendal-Roberts Theory of Adhesion (also known as the JKR Model) is
typically used for calculating the contact forces acting on elastic and adhesive
particles and assumes that the attractive forces are short range. To date, a large
number of studies on many different particulate systems have been reported in the
literature using the JKR model. However, most of them use a simplified version of
the JKR model that depends on the surface energy of the particles involved in the
contact and also for cases where materials of the same type are involved too. It
calculates the additional work required to break the contact (adhesion) after the
physical detachment of particles, thus making it applicable to contacts involving
very small particles.
Particles may adhere together in a number of ways depending on the type of bond
formed. For very small particles (smaller than 100 µm), van der Waals forces become
significant and particles tend to stick to each other.
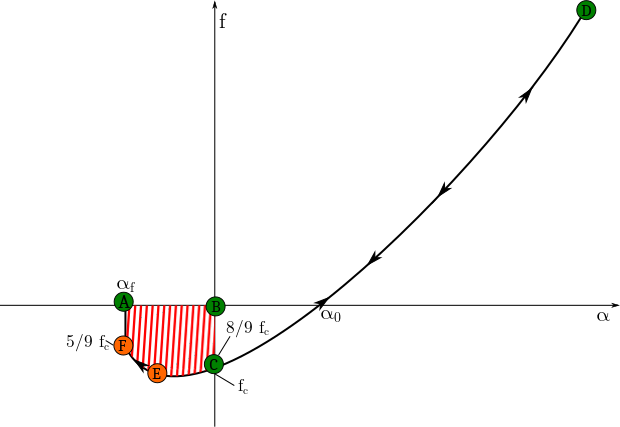
The model is suitable for elastic and adhesive systems and the force-overlap response
of the JKR model is shown. It states that when two elastic and adhesive spheres
approach each other, the force acting on the spheres is zero (from A to B). The DEM
contact between these two spheres is established when they physically come into
contact (B), and the normal contact force immediately drops to 8/9fc,
where fc is the pull-off fore due to the presence of the van der Waals
attractive forces (C). Upon loading the two spheres, the normal contact force
follows the trend from C to D. During the recovery stage (unloading), the stored
elastic energy is released and is converted into kinetic energy which causes the
spheres to move in the opposite direction. All the work done during the loading
stage is recovered when the contact overlap becomes zero (C). However, at this
point, the spheres remain adhered to each other and further work is required to
separate the two spheres (within the area highlighted in red). In order to break the
contact, a minimum force equal to the pull-off force (E) is required and the contact
breaks at F.
In order to account for the work of adhesion, the EDEM
contact radius must be activated and set to be greater than the physical radius of
the particle as follows:
Where r is the physical particle radius and αf is the relative approach
where the contact breaks. The range of values where the EDEM contact radius can be considered valid should be defined
prior to the simulation by using equations 3 and 5.
Note: In
EDEM simulations, in order to
account for work of adhesion, it is important to increase the contact radius of the
particle by selecting . The contact radius being greater than the physical radius allows the
influence of a negative overlap in the force calculations. The following figure
describes the Loading and Unloading behavior of the JKR model.
The normal contact force (or adhesion force) in the JKR V2 model is defined as:
Where E*, R*, Γ, and a are the relative elasticity, relative
radius, interfacial surface energy (also known as work of adhesion) and contact
radius (as described in Thornton,
2015, respectively, which is not the same as the EDEM contact radius. In this implementation of the model, the
adhesive force depends on the interfacial surface energy and the relative approach
(negative) at which the contact breaks and are defined as:
Here, γ1 and γ2 are the surface energies of the two spheres and
γ1,2 is the interfacial surface energy. For the special case where
two spheres of the same material come into contact, the interfacial surface energy
is zero γ1,2 = 0 , and the interfacial surface energy becomes Γ = 2γ.
The relative approaching distance, α, (also known as contact overlap) and the pull-up
force are defined as:
Where a is the normal overlap between particles. For contacts between spheres of the
same material, Γ = 2γ. Therefore, equations for 1 and 4 can be rewritten as
follows:
Note: The corresponding relative approach in the JKR model, a,
is independent from the contact radius that you prescribe in EDEM. The latter is only used to activate the model and
the JKR force will be calculated as described and applied for both positive and
negative overlaps.