2DoF Pendulum
An example of a mechanical system of a pendulum in a cart.
Consider the following mechanical system of a pendulum in a cart. This system has two degrees of freedom: the translation across the horizontal axis x, and the rotation of the pendulum around its axis α.
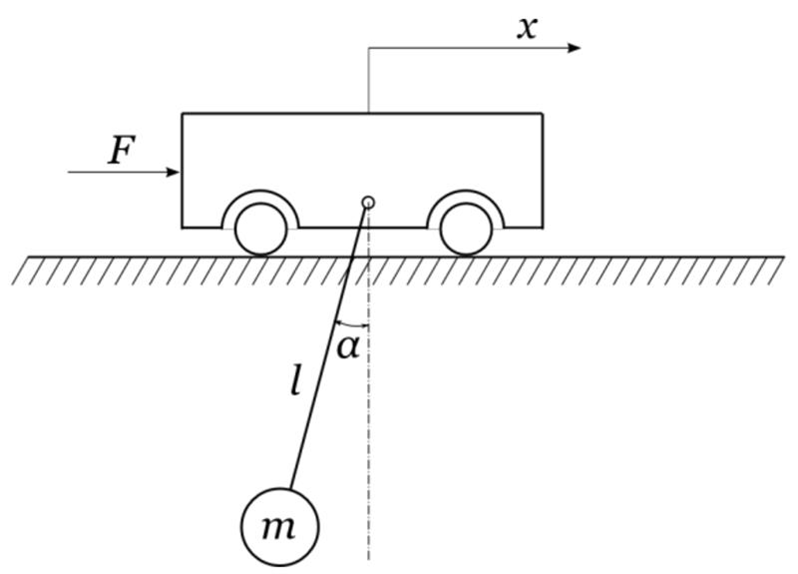
Being a mechanical system, it has two state variables for each of the degree of freedom (position and its derivative), so in this scenario, there are four states variables
The goal is to create a romAI model able to predict the response of the system based on already existing data (system identification).
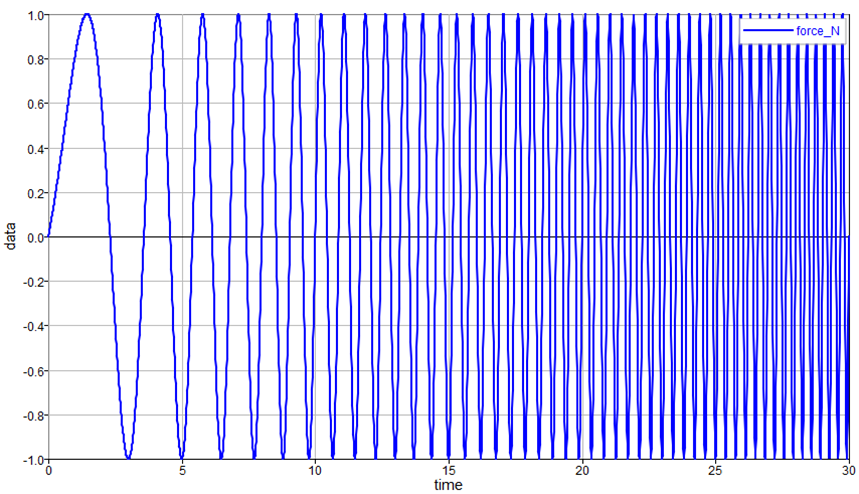
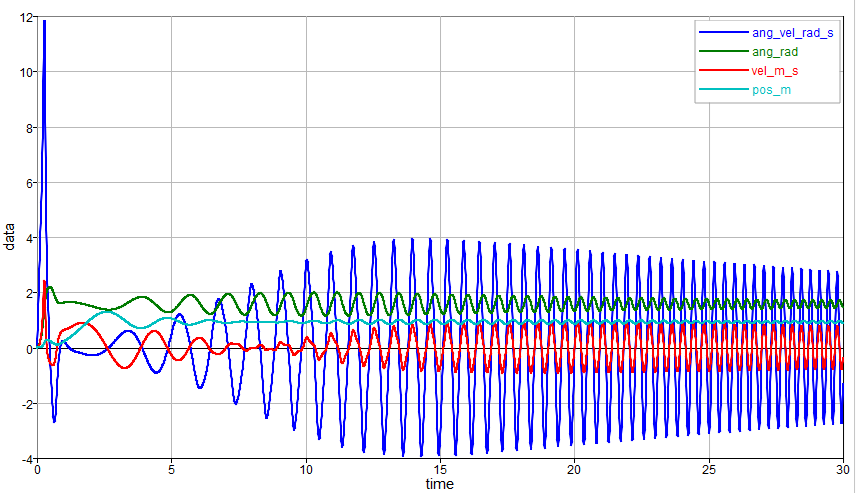
To train the romAI model, time histories of inputs, outputs, and state variables are needed. In this case, the training dataset consists of three separate time histories, each with a different amplitude of variable frequency Force {F}.
Here, for example is one of the three time-histories of the training dataset.
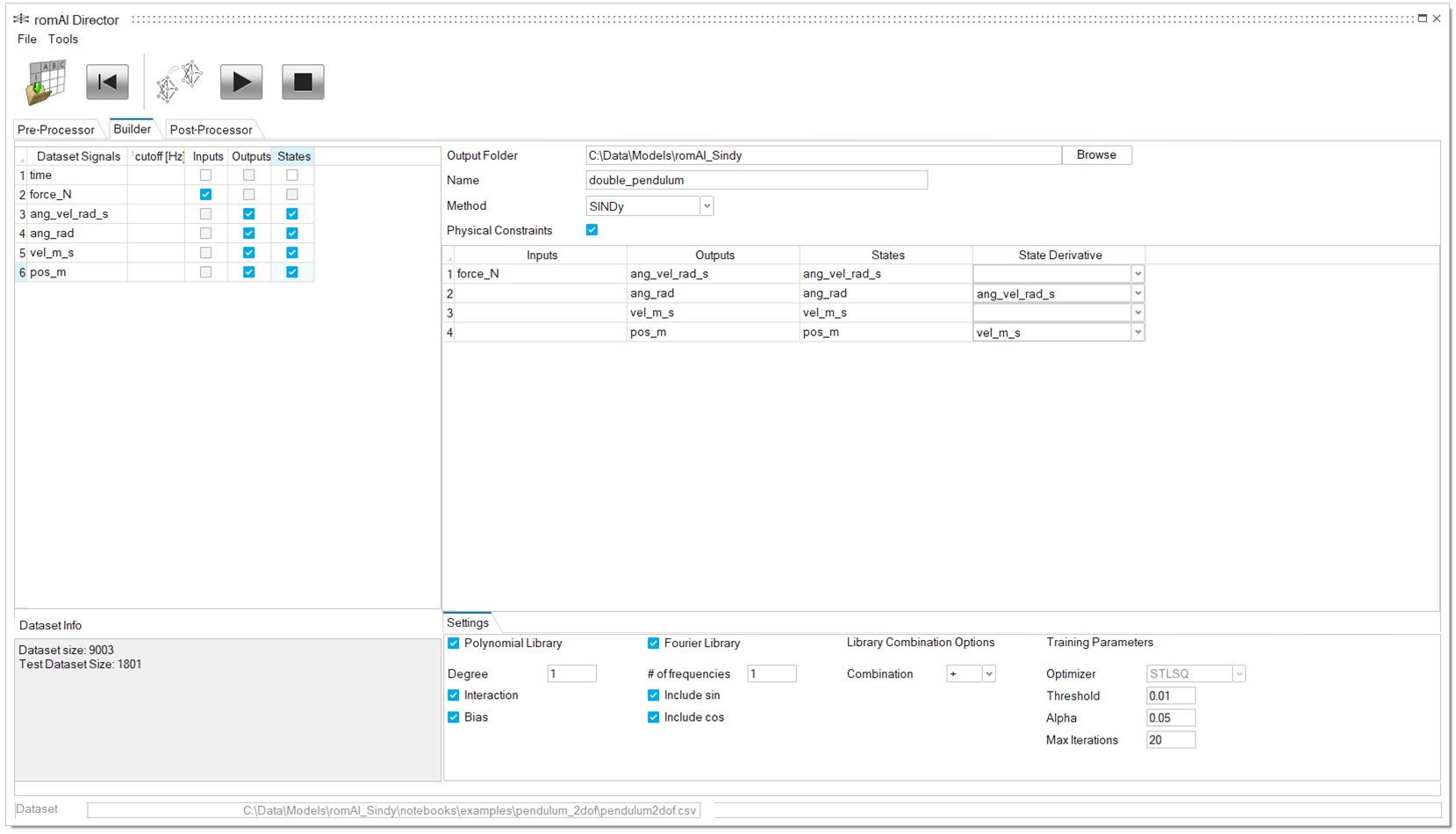
Given the dataset, the romAI model can be built easily through the Builder tab.
- Specify the model path and name.
- Choose SINDy as the Method.
- Define the model settings as shown in the image below.
- Start the training the procedure.
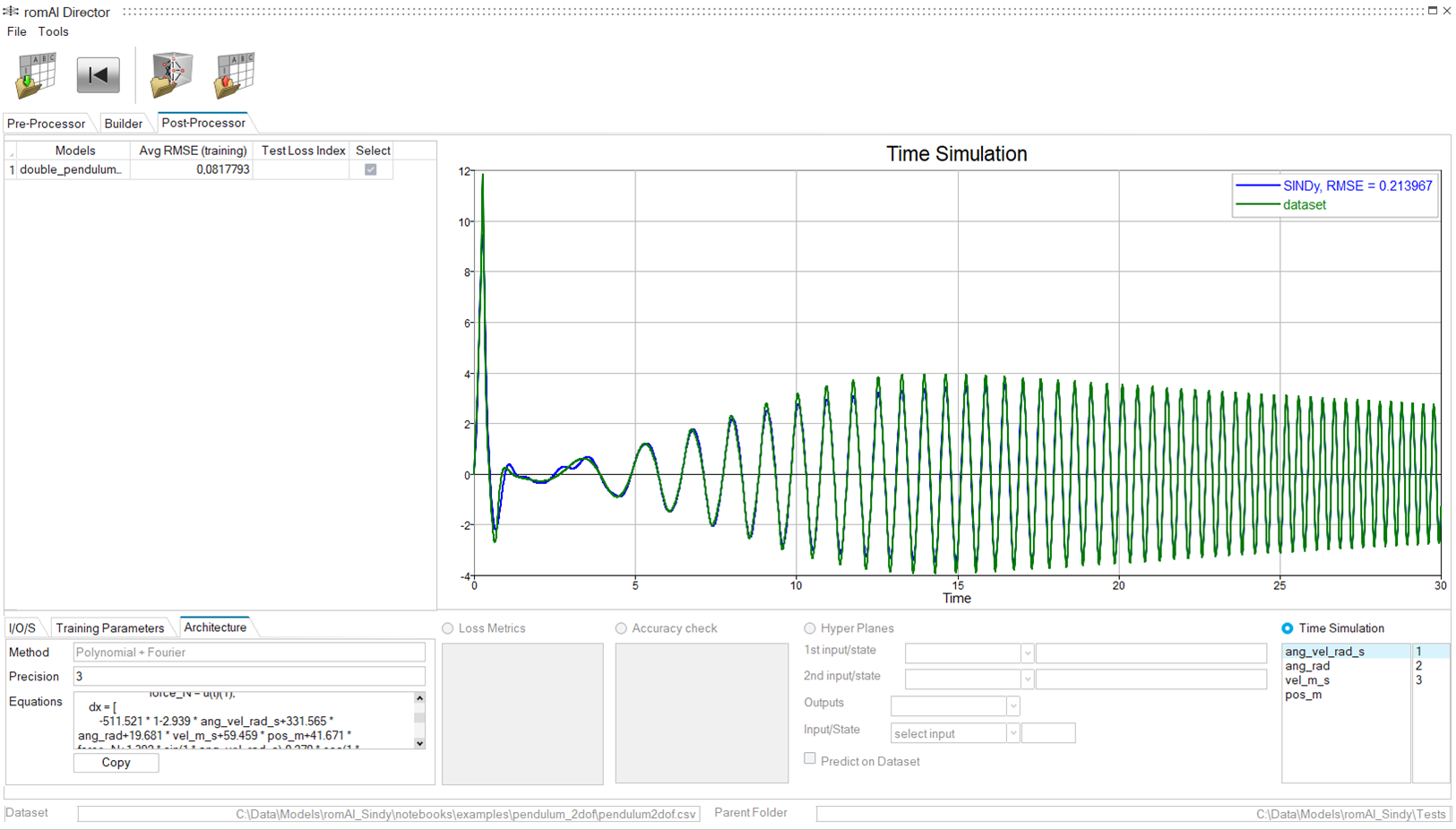
After the training has completed, you are automatically redirected to Post-Processor tab with all the other romAI model information consisting of the Average RMSE (Root mean squared error), as well as the models equations in the Architecture tab.
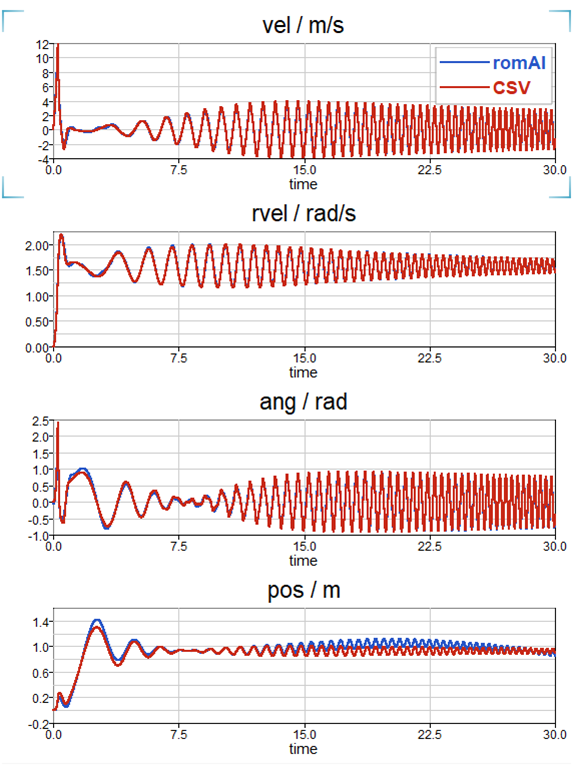
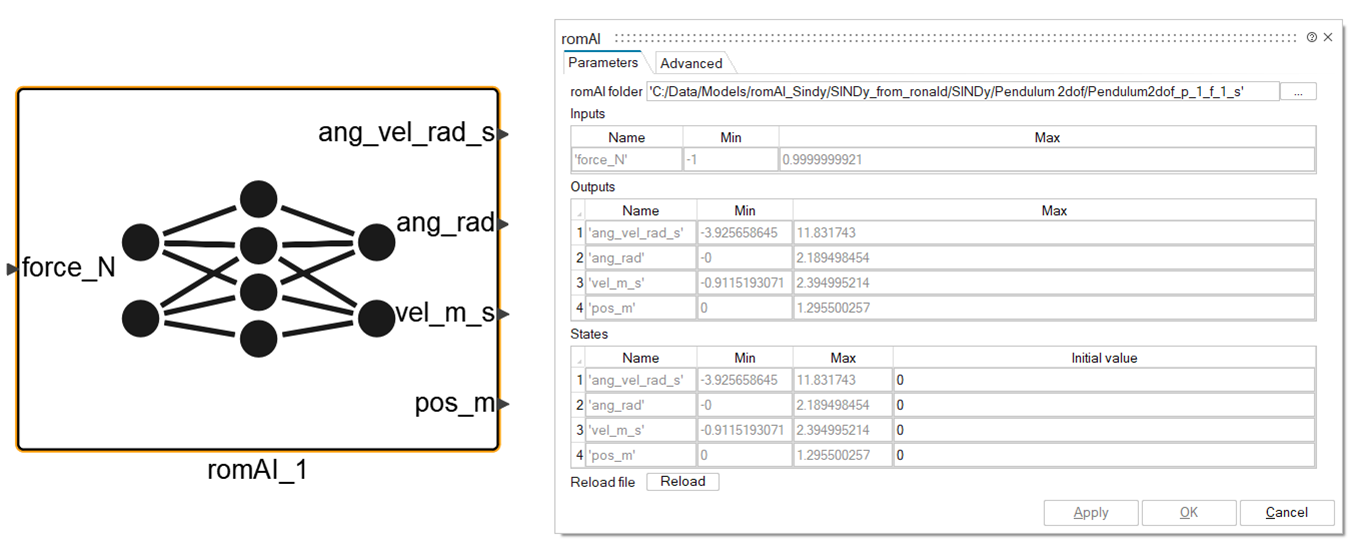
Moreover, the romAI model can be deployed in Twin Activate using the built-in romAI block
The following are the results produced by the romAI model with respect to the reference CSV measurement data.