CG/Inertia Summary
The total mass, center of gravity, and inertia of the models or bodies within a model can be quickly obtained through the CG/Inertia Summary utility.
From the Geometry ribbon, click the Display CG Inertia Summary satellite icon that appears when you hover over the Bodies tool.
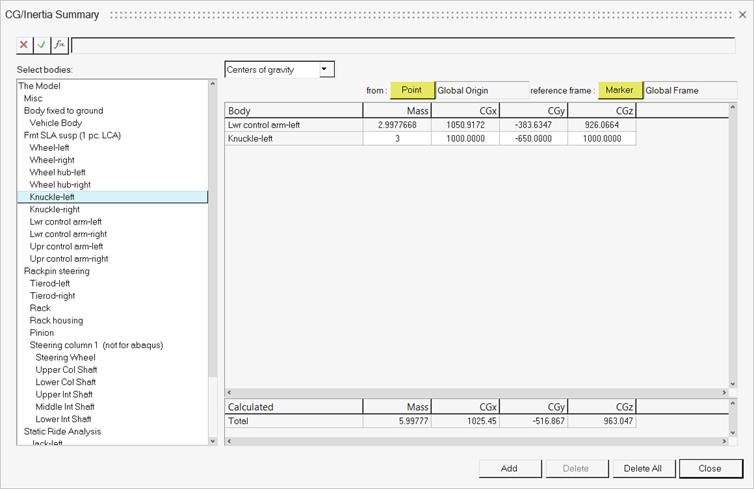
- To add entities to the list, select bodies or systems from the Select bodies tree on the left of the dialog and click Add (or double click).
- When a system is added, all of its child entities, including other sub-systems, get added to the list.
- To remove an entity, select the body in the table and click Delete.
- Click Delete All to clear the table.
Flexbodies can also be included. The utility takes into account the calculated flexbody properties and corrects the location of the flexbody reference frame if it is not coincident with model reference frame.
CG/Mass/Inertia can be calculated with regard to any reference frame using a Marker. CG can be calculated from any Point. Inertias can be calculated at Total CG (calculated for the selected bodies) or any other Point.
The Mass and Inertia fields are editable. Editing these values changes the body mass and inertia properties. When the field is clicked to edit, it will show the value of the property that is currently set.