Track Collision Data
During a simulation, EDEM can record data about both contacts and collisions.
- Contacts are the impacts occurring between elements at data write-out points. In other words, the contact is in progress when the write-out takes place. The contact has an associated force, position and so on - these are discrete values. If two elements stay in contact with each other for some time such as over four write-out points, four contacts will be stored and each of these may have a different force, position, and so on.
- Collisions are complete impacts. When two elements collide, it is registered as one collision, regardless of how long the elements stay in contact. Data is collected for the duration of the collision. For example, total energy loss, min/max/average normal force data, and so on. Collisions may occur in-between write-outs and never register as contacts.
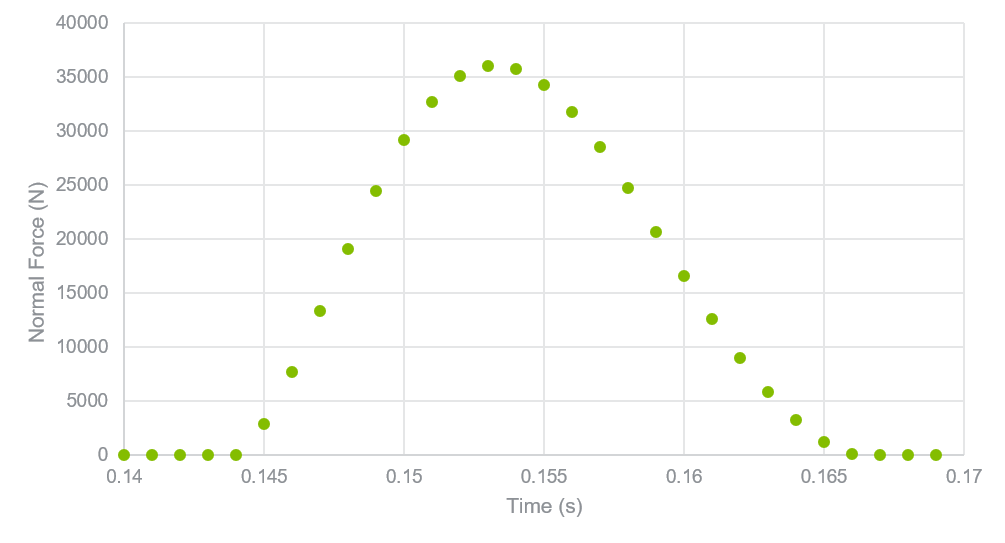
The following example shows a force-time graph for a single particle-geometry collision
where each point is a contact.
EDEM records all contact data as standard. To record
collision data, you must enable Track Collisions. Storing
collision data will significantly increase memory usage and reduce the speed of the
simulation. Collision data is stored in the memory until it is written out at the rate
specified in the Simulator. If a large number of collisions are occurring, and the
write-out frequency is too low, the amount of data being stored in memory will become
very large and exhaust all memory resources. To minimize this, ensure that the data is
written out routinely.
Note: As of EDEM
2020.1, the forces for collisions are undamped.
Energy Loss
Energy loss in a collision between two elements (particle-particle or
particle-geometry) lasting n contacts over time is calculated by:
Where
| Expression | Description |
|---|---|
| F | Contact force [N] |
| Vi | Relative velocity after contact [ms-1] |
| Vi-1 | Relative velocity before contact [ms-1] |
| dt | Time step [s] |