Evaluate your design in real-time using SimSolid dynamics
analysis.
Setup
Specify the modal results to which the analysis is linked. The modal
solution must exist in the current design study. In SimSolid, the time integration of the equations of
motion is extremely fast and all modes are always included in the
analysis.
For frequency and random response, specify the frequency span upper and
lower limits. For transient response, specify Time
span.
For response spectrum analysis, specify the modal combination type. If the
CQC method is selected, damping ratio is required.
Specify damping using Rayleigh damping coefficients or Modal damping.
Select the Evaluate peak responses during solving
check box to evaluate peak responses during solving phase.
Assumes the damping matrix is proportional to the mass and stiffness
matrices. You need to specify values for Mass (F1) and Stiffness (F2) in
the Dynamics creation dialog to use this method.
Modal Damping
Creates critical damping ratio for each mode. You can specify this value
in the Dynamics analysis creation dialog.
Notes for Dynamics Analysis
When the base excitation type is displacement, the initial condition for
displacement and velocity is always assumed to be zero.
In SimSolid, the boundary compatibility is
approximately met. The response at the constrained end is not going to be an
absolute zero but is relatively small compared to the peak responses.
Equivalent radiated power density is calculated as:
Where,
Normal velocity of the picked point
ERPC (Speed of sound in air)
343 m/s
ERPRHO (Density of air)
1.225 Kg/m3
ERPRLF (Radiation loss factor)
1
Equivalent radiated power is calculated as an integral of
ERP density over picked faces as:
Phase for Absolute displacement can be queried using Pick Info for frequency
dynamics.
Relationship between relative and absolute displacement in frequency
dynamics is as follows.
Relative motion is calculated as:
Where base excitation is:
Solving this differential equation,
the relative displacement can be calculated as:
Note: The absolute motion is calculated by summing
up the relative motion with the base excitation.
In frequency and random dynamics, the Complex Function method is used to
solve differential equations. Displacement, velocity, and acceleration
results have complex components.
Given complex values of displacement
as:
Evaluate magnitude and phase of with the following equations:
and so on for and . In SimSolid, and are exported.
You can evaluate and using the following
equations:
Displacement magnitude is
calculated as:
With the following
equation:
You obtain
Where,
Example:
Displacement magnitude: 44.5
When a transient dynamics analysis is linked to a prestressed modal
analysis, a new result type is offered called Total Displacement. Total
Displacement is the combination of the prestressed and dynamic
displacements. Therefore, displacement magnitude is the displacement caused
by the dynamic analysis.
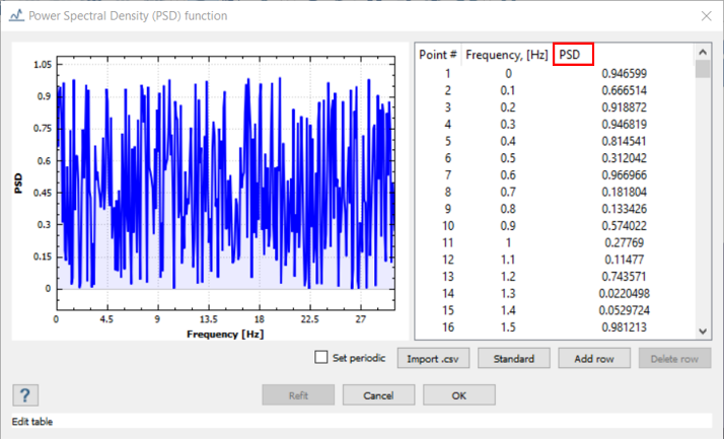
For a random response analysis, the Power Spectral Density (PSD) of the
response , is related to the power spectral density of
the source, , by:
Where, is the frequency response
function.
For better understanding, let us take an example of base
excitation with acceleration as the excitation type as an input to a
random response analysis.
The base excitation with amplitude is
used to define the input for frequency response analysis, so the units
of the acceleration excitation type would be either of below highlighted
units, m/sec2; mm/sec2; cm/sec2; G;
in/sec2
Units for the PSD function depend on the boundary condition. In this
example, as base excitation is given as acceleration, the unit for PSD
will be (mm/s2)2/Hz.Figure 1.