/INTER/TYPE11
Block Format Keyword This interface simulates impact between edge to Edge or lines. A line can be a beam or truss element or a shell edge or spring elements.
- Impacts occur between a main and a secondary line.
- A secondary line can impact on one or more main lines.
- A line can belong to the main and the secondary side. This allows self-impact.
- This interface can be used in addition to /INTER/TYPE7 to solve the edge to edge limitation of interface TYPE7.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/TYPE11/inter_ID/unit_ID | |||||||||
| inter_title | |||||||||
| line_IDs | line_IDm | Istf | Ithe | Igap | Irem_gap | Idel | |||
| Stmin | Stmax | %mesh_size | dtmin | Iform | sens_ID | ||||
| Stfac | Fric | Gapmin | Tstart | Tstop | |||||
| IBC | Inacti | VISs | VISF | Bumult | |||||
| fric_ID | |||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kthe | fct_IDK | AscaleK | Tint | Ithe_form | |||||
| Frad | Drad | ||||||||
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| inter_ID | Interface
identifier. (Integer, maximum 10 digits) |
|
| unit_ID | Unit Identifier. (Integer, maximum 10 digits) |
|
| inter_title | Interface
title. (Character, maximum 100 characters) |
|
| line_IDs | Secondary line identifier.
3 (Integer) |
|
| line_IDm | Main line identifier.
3
(Integer) |
|
| Istf | Stiffness definition flag.
(Integer) |
|
| Ithe | Heat transfer flag.
(Integer) |
|
| Igap | Gap/element option flag.
(Integer) |
|
| Irem_gap | Flag for deactivating
neighboring secondary lines if element size < gap value, in case
of self-impact contact. 18
|
|
| Stmin | Minimum stiffness (used
only when Istf ≠
1). (Real) |
|
| Stmax | Maximum stiffness (used
only when Istf ≠
1). Default = 1030 (Real) |
|
| %mesh_size | Percentage of mesh size
(used only when Igap =
3). Default = 0.4 (Real) |
|
| dtmin | Minimum interface time
step. 12 (Real) |
|
| Iform | Friction penalty
formulation type. 14
(Integer) |
|
| sens_ID | Sensor ID to
activate/deactivate the interface. 13 If an ID sensor is defined, the activation/deactivation of interface is based on sensor and no more on Tstart, Tstop. (Integer) |
|
| Idel | Node and segment deletion
flag. 4
(Integer) |
|
| Stfac | Stiffness scale factor
applied to main side of the interface (if Istf ≠
1). Default = 1.0 (Real) |
|
| Interface stiffness (if
Istf =
1). Default = 1.0 (Real) |
||
| Fric | Coulomb
friction. (Real) |
|
| Gapmin | Minimum gap for impact
activation. (Real) |
|
| Tstart | Start
time. (Real) |
|
| Tstop | Temporary deactivation
time. (Real) |
|
| IBC | Deactivation flag of
boundary conditions at impact. (Booleans) |
|
| Inacti | Deactivation stiffness
flag. 11
(Integer) |
|
| VISs | Critical damping
coefficient on interface stiffness. Default = 0.05 (Real) |
|
| VISF | Critical damping
coefficient on interface friction. Default =1.0 (Real) |
|
| Bumult | Sorting factor. 12
13
Default = 0.20 (Real) |
|
| fric_ID | Friction identifier for
friction definition for selected pairs of parts.
(Integer) |
|
| Kthe | Heat exchange coefficient
(if fct_IDK =
0). 15
Default = 0.0 (Real) |
|
| Heat exchange scale factor
(if fct_IDK ≠ 0). 15
Default = 1.0 (Real) |
||
| fct_IDK | Heat exchange definition
with contact pressure identifier. Default = 0 (Integer) |
|
| AscaleK | Abscissa scale factor on
fct_IDK. Default = 1.0 (Real) |
|
| Tint | Interface temperature.
15 (Real) |
|
| Ithe_form | Heat contact formulation flag.
(Integer) |
|
| Frad | Radiation factor. 15 (Real) |
|
| Drad | Maximum distance for
radiation computation. 15 (Real) |
Flags for Deactivation of Boundary Conditions: IBC
| (1)-1 | (1)-2 | (1)-3 | (1)-4 | (1)-5 | (1)-6 | (1)-7 | (1)-8 |
|---|---|---|---|---|---|---|---|
| IBCX | IBCY | IBCZ |
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| IBCX | Deactivation flag of X
boundary condition at impact.
(Boolean) |
|
| IBCY | Deactivation flag of Y
boundary condition at impact.
(Boolean) |
|
| IBCZ | Deactivation flag of Z
boundary condition at impact.
(Boolean) |
Comments
- A non-zero Gapmin value must be input in case of a line is a spring element.
- In case of SPMD, each main segment defined by line_IDm must be associated to an element (possibly to a void element).
- The secondary and main lines are defined using Lines option. A self-impacting contact is defined when line_IDs > 0 and line_IDm = 0.
- Flag Idel =1 has a CPU cost higher than Idel =2.
- A default value for Gapmin is computed as:While,
- Main surface gap
- Average thickness of the main elements for shell elements
- Length of the smallest side of solid elements
- Smallest cross section of the beam and truss elements
- Secondary surface gap: computation identical to ; except that it is applied on secondary side elements.
- Variable gap
- If Igap = 1000, gap is constant and is equal to Gapmin.
- If Igap = 1,
gap is variable and is computed for each impact as:
- If Igap = 3,
gap is variable and is computed for each impact as:Where,
- Main element gap
- With thickness of the main element for shell elements
- With length of the smallest side of a solid element
- With being the cross section of the truss and beam elements
- For spring elements
- Is computed the same way; except that it is applied on secondary side elements
- Length of the smaller edge of element
- Length of the smaller edge of elements connected to the secondary node
The variable gap is always at least equal to Gapmin.
- Contact stiffness
There is no limitation value on the stiffness factor (but a value greater than 1.0 can reduce the initial time step). Contact stiffness for shell, solid and beam elements is computed as:
If Istf =1:
If Istf = 2, 3, 4 or 5:
Where,-
is computed from both main segment
stiffness
and secondary segment stiffness
as follows, if Istf ≠
1:
Istf = 2,
Istf = 3,
Istf = 4,
Istf = 5,
- Where,
is main segment stiffness and
computed as:
when main segment lies on a shell or is shared by shell and solid:
when main segment lies on a solid:
Where,- Segment area
- Volume of the solid
- Bulk modulus
-
is an equivalent nodal stiffness
considered:
when node is connected to a shell element:
when node is connected to solid element:
When using /PROP/VOID and /MAT/VOID, material properties and thickness for the VOID material must be entered otherwise the contact stiffness of the void elements will be zero. This is especially important if VOID shell elements share elements with solid elements as the stiffness of the shell elements is used in the contact calculation.
For spring elements not attached to any other elements, use Istf=1 and specify the contact stiffness using Stfac. Otherwise, no contact will be detected.
-
is computed from both main segment
stiffness
and secondary segment stiffness
as follows, if Istf ≠
1:
- Deactivation of boundary condition is applied to nodes of surface 1.
- Inacti = 3 may create
initial energy if the node belongs to a spring element.Inacti = 6 is recommended instead of Inacti = 5, to avoid high frequency effects into the interface.
Figure 1. 
- The sorting factor Bumult is used to speed up the sorting algorithm.
- The default value for Bumult is automatically increased to 0.30 for models which have more than 1.5 million nodes and to 0.40 for models with more than 2.5 million of nodes.
- If the time step of a secondary node in this contact becomes less than dtmin, the secondary node is deleted from the contact and a warning message is printed in the output file. This dtmin value takes precedence over any model interface minimum time step entered in /DT/INTER/DEL.
- When sens_ID is defined for activation/deactivation of the interface, Tstart and Tstop are not taken into account.
- If fric_ID is defined, the contact friction is defined in /FRICTION
and the friction input Fric in this input card is not used.
For friction formulation:
Friction penalty formulation Iform- If Iform =
1, (default) viscous formulation, the friction
forces are:
While an adhesion force is computed as:
with
- If Iform =
2, stiffness formulation, the friction forces
are:
While an adhesion force is computed as:
with
Where, is tangential velocity of the secondary node relative to the main segment.
Iform = 2 is recommended for implicit and low speed impact explicit analysis.
- If Iform =
1, (default) viscous formulation, the friction
forces are:
- Heat exchange:By Ithe=1 (heat transfer activated) to consider heat exchange and heat friction in contact.
- If Ithe = 0, then heat exchange is between shell and constant temperature contact Tint.
- If Ithe_form = 1, then heat exchange is between all contact pieces.
Tint is used only when Ithe_form=0. In this case. The temperature of main side assumed to be constant (equal to Tint). If Ithe_form=1 then Tint is not taken into account. So, the nodal temperature of main side will be considered.
If Ithe > 1, the material of the secondary side needs to be a thermal material using finite element formulation for heat transfer (/HEAT/MAT).
Heat exchange coefficient:- If fct_IDK = 0, then Kthe is heat exchange coefficient, and the heat exchange depends only on heat exchange surface.
- If fct_IDK ≠ 0, Kthe is a scale factor, and the heat exchange depends on contact pressure:
While, is the function of fct_IDK.
- Thermal conduction is computed when the secondary node falls into the Gap.
- Radiation is considered in
contact if
and the distance,
, of the secondary node to the
main segment is:While is the maximum distance for radiation computation. The default value for is computed as the maximum of:
- Upper value of the Gap (at time 0) among all nodes
- Smallest side length of secondary element
It is not recommended to set the value too high for , which may reduce the performance of Radioss Engine. The heat exchange is computed only from main to secondary.
A radiant heat transfer conductance is computed as:
with
Where,- Stefan Boltzman constant
- Emissivity of secondary surface
- Emissivity of main surface
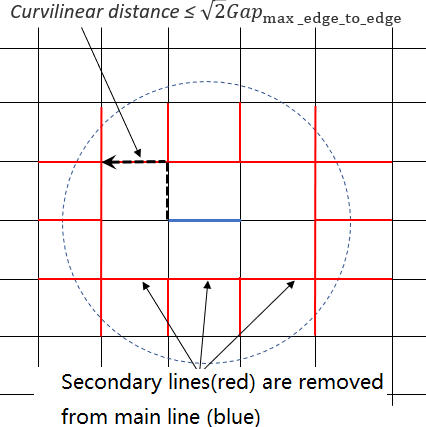
- If the element size is less
than the contact gap and there are self-impact contacts, no physical contact
with neighboring secondary lines can occur. In case of self-contact, using Irem_gap=2, contact with the neighboring secondary line segments
will be removed.For each main line, element connectivity is used to determine neighboring lines. Then secondary lines for which curvilinear distance of at least one node is less than (in initial configuration) are removed from the contact with this main line. The real distance between main and secondary lines is also checked to verify that all neighboring lines are removed.
Figure 2. Secondary lines removed from edge to edge contact