/FRIC_ORIENT
Block Format Keyword Define specific directions for orthotropic contact friction for the main surface for contact interfaces TYPE7, TYPE19, TYPE24, and TYPE25.
These orientations are used when an orthotropic friction model is defined in /FRICTION Idir=1. Only shell elements are supported.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /FRIC_ORIENT/fric_ID | |||||||||
| friction_orientation_title | |||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /FRIC_ORIENT/fricorient_ID | |||||||||
| friction_orientation_title | |||||||||
| grpart_ID | part_ID | ||||||||
| VX | VY | VZ | Skew_ID | Iorth | |||||
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| fric_ID | Friction
identifier. (Integer, maximum 10 digits) |
|
| friction_orientation_title | Friction model
title. (Character, maximum 100 characters) |
|
| grpart_ID | Part group identifier
/GRPART. (Integer) |
|
| part_ID | Part
identifier. Ignored if, grpart_ID is defined. (Integer) |
|
| VX | X component for
reference vector. Default = 1.0 (Real) |
|
| VY | Y component for
reference vector. Default = 1.0 (Real) |
|
| VZ | Z component for
reference vector. Default = 1.0 (Real) |
|
| Skew_ID | Skew identifier for
reference vector. 2
If the local skew is defined, its X-axis replaces the global vector, . VX, VY and VZ coordinates are ignored. Default = 0 (Integer) |
|
| Angle. 2 (Real) |
||
| Iorth | Orthotopic system
formulation flag for reference vector.
(Integer) |
Example
#RADIOSS STARTER
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FRICTION/999
test no 1
# Ifric Ifiltr Xfreq Iform
0 0 0 2
# default friction for rest parts which not specifically defined below
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .2 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#friction between part group ID 111 and ID 222
#GRpartID1 GRpartID2 PartID_1 PartID_2 Idir
111 222 0 0 0
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .1 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#friction between part ID 1 and ID 3
#GRpartID1 GRpartID2 PartID_1 PartID_2 Idir
0 0 1 3 0
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .2 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#friction between part ID 1 and ID 4; orthotropic direction considered
#GRpartID1 GRpartID2 PartID_1 PartID_2 Idir
0 0 1 4 1
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .4 0
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .2 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#friction between part ID 1 and ID 5
#GRpartID1 GRpartID2 PartID_1 PartID_2 Idir
0 0 1 5 0
# C1 C2 C3 C4 C5
0 0 0 0 0
# C6 Fric VisF
0 .3 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/INTER/TYPE7/2
New INTER 2
# Slav_id Mast_id Istf Ithe Igap Ibag Idel Icurv Iadm
9 10 4 0 2 0 1 0 0
# Fscalegap Gap_max Fpenmax
0 0 0.8
# Stmin Stmax %mesh_size dtmin Irem_gap Irem_i2
1 0 0 0 0 0
# Stfac Fric Gapmin Tstart Tstop
0 .35 2.1 0 0
# IBC Inacti VisS VisF Bumult
000 6 0 0 0
# Ifric Ifiltr Xfreq Iform sens_ID fct_IDf AscaleF fric_ID
0 0 0 2 0 0 0 0
/GRNOD/PART/9
INTER_group_9_of_SURF
4 5
/SURF/PART/10
INTER_group_10_of_PART
1
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FRIC_ORIENT/1
define orientation of part ID 1
# GRpartID PartID
1
# Vx Vy Vz skew_ID Phi Iorth
1 0 1 45
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|| Parts | Idir | Friction Coefficient | |
|---|---|---|---|
| All parts not listed | - | 0.2 | |
| /GRPART/111 - /GRPART/222 | 0: Isotropic | 0.1 | |
| part_ID1 - part_ID3 | 0: Isotropic | 0.2 | |
| part_ID1 - part_ID4 | 1: Orthotropic | Dir1 = 0.4 | Dir2 = 0.2 |
| part_ID1 - part_ID5 | 0: Isotropic | 0.3 | |
In this example, the orthotripoc direction for friction between parts 1 and 4 is defined by the vector and angle in /FRIC_ORIENT/1.
Comments
- These friction directions replace the orthotropic directions defined in the property for defined parts.
- Orthotropy in local
coordinate system via two different ways:
- Skew_ID =0: Orthotropic direction defined with global vector (components defined in Line 4) and angle (angle in degree).
- Skew_ID ≠0: Orthotropic direction defined with skew (X-axis in skew replaces the global vector ) and angle (angle in degree).
For both ways (with vector or with skew), the projection of vector (or x-axis of skew) on shell element plane becomes the vector . Then the orthotropic direction (direction 1) is vector turned degrees where the positive direction is based on the shell normal .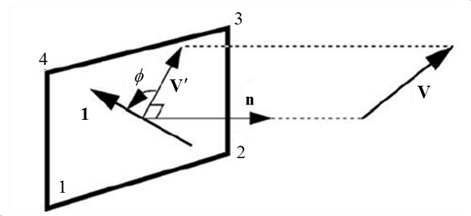
Figure 1.