The RVD Rolling Friction contact model offers an alternative friction calculation to
the Standard EDEM Rolling Friction model.
In this model, the rolling friction depends on relative rotational velocity of a
pair of elements in contact in a manner suggested in (Zhou, et al.
1999).
This Relative Velocity Dependent (RVD) Rolling Friction model is
offered as a 3D generalization of the “Type A: Directional Constant Torque” model
type discussed in the paper (Ai, et al.
2011) with one difference in the method of calculating the relative
rotational velocity of two elements in contact. While in reference (Ai, et al.
2011) the relative rotational velocity is evaluated from tracking the
point of contact, in the EDEM RVD Rolling Friction
model, the relative rotational velocity is calculated from the values of
instantaneous rotational velocities of two elements in contact as described below.
This implementation detail insured proper functionality in three dimensions without
affecting the computational time.
In particular, this contact model accounts
for rolling friction by applying a constant torque to the contacting surfaces. The
torque depends on the relative rotational velocity of two particles in contact,
particle i and particle j, as follows:
With μr the coefficient of rolling
friction, and R* is the equivalent radius of two elements in contact. The
unit vector of relative rotational velocity, ωrel, is calculated as
follows:
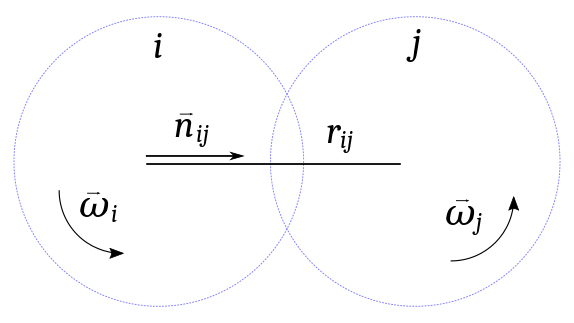
Where nij is a unit vector pointing
from particle i to the point of contact as shown in the following figure: