The Multi Body Dynamics Coupling Interface
The Multi Body Dynamics (MBD) Coupling Interface is a subset of features in the EDEM Coupling Interface specifically designed for coupling EDEM to Multi Body Dynamics packages.
Its primary function is to allow users to perform simulations with programmatic control of Geometry motions and Physics, allowing implementation of complex motions, rigid body Physics, or coupling with advanced Multi Body dynamics codes.
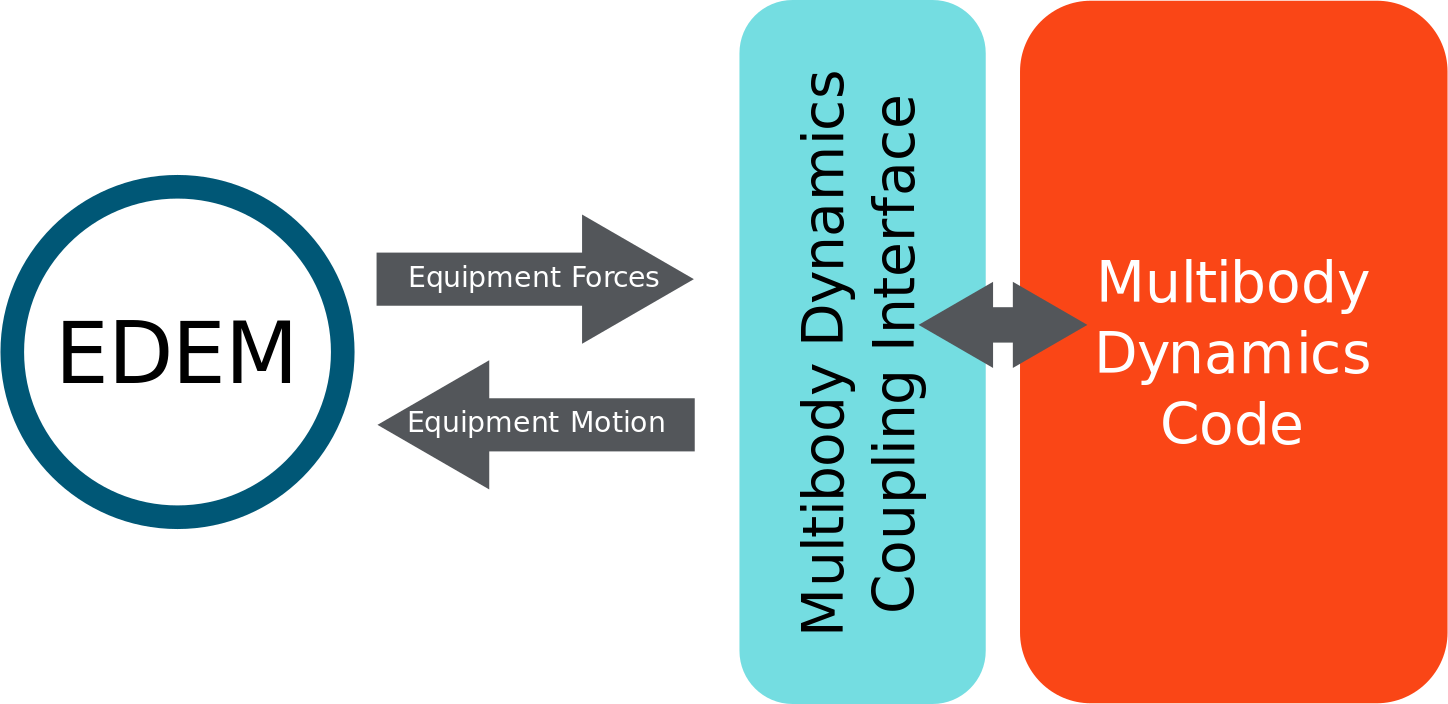
The Multi Body Dynamics Coupling Interface allows the exchange of contact forces and equipment motion between EDEM and a coupled code. The coupled code can retrieve bulk material forces resulting from contact with the equipment surfaces calculated in EDEM and return equipment kinematics.
The simplicity of the data exchange method between EDEM and coupled Multi Body dynamics code allows for the rapid development of rigid body dynamics for inclusion in DEM simulations. The control over EDEM simulations offered by the interface is also suitable for coupling and co-simulation with third-party Multi Body dynamics software such as LMS Virtual Lab Motion, Matlab Simulink, and MSC Adams. Through coupling with MBD software, modeling can be extended to contain a wide range of components including hydraulic control systems, motors and interconnected equipment Geometries.
Initiate the Coupling Interface
The Coupling Interface has a series of initiation flags. These flags allow you to
predefine what functionality the coupling script will use. The current list of flags
can be found in the CCouplingFeatureFlags class in
ApiTypes.h. Older coupling codes written prior to this
functionality will run without the flags being defined. However, they will not
benefit from the performance improvement.