/SENSOR/RWALL
Block Format Keyword Describes the sensors used to activate or deactivate an object according to rigid wall force.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /SENSOR/RWALL/sens_ID/unit_ID | |||||||||
| sens_title | |||||||||
| Tdelay | |||||||||
| rwall_ID | DIR | Fmin | Fmax | Tmin | |||||
Defintion
| Field | Contents | SI Unit Example |
|---|---|---|
| sens_ID | Sensor
identifier. (Integer, maximum 10 digits) |
|
| unit_ID | Optional unit
identifier. (Integer, maximum 10 digits) |
|
| sens_title | Sensor
title. (Character, maximum 100 characters) |
|
| Tdelay | Time
delay. (Real) |
|
| DIR | Force direction.
(Integer) |
|
| Fmin | Minimum
force. Default = 0 (Real) |
|
| Fmax | Maximum
force. Default = 0 (Real) |
|
| Tmin | Minimum time duration
before activation when criteria is reached.
(Real) |
Comments
- Sensors can be used to activate airbags, imposed forces, pressures, and fixed velocities.
- Sensors can be used to activate or deactivate these elements: brick, quad, shell, truss, beam, spring or 3N Shell with /ACTIV.
- For Sensor type
RWALL:
The sensor is activated one cycle after impact on the rigid wall.
A sensor is used for one rigid wall. You can use several type RWALL sensors.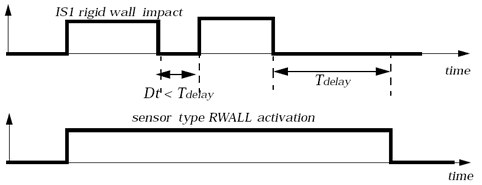
Figure 1.Sensor is activated when contact on the rigid wall is detected, and the following force criteria is satisfied:- or during Tmin
Dir defines Force direction:- FN
- Normal Force
- FT
- Tangent Force
- X
- Force in X direction
- Y
- Force in Y direction
- Z
- Force in Z direction
Sensor is deactivated if the contact is lost
- Values for force and moment component limits in the force-based sensors (RWALL) can be positive and negative. Normal, tangent, total force and moment values are always positive.