| prop_ID |
Property
identifier. (Integer, maximum 10 digits) |
|
| unit_ID |
Unit Identifier. (Integer,
maximum 10 digits) |
|
| prop_title |
Property
title. (Character, maximum 100 characters) |
|
| Mass |
Spring mass.
- If Ileng = 0,
-
- If Ileng = 1,
-
(Real) |
or
|
| Inertia |
Spring inertia.
- If Ileng = 0,
-
- If Ileng = 1,
-
(Real) |
or
|
| Skew_ID |
Skew system
identifier. (Integer) |
|
| sens_ID |
Sensor
identifier. (Integer) |
|
| Isflag |
Sensor flag. 4
- =0
- Spring element activated.
- =1
- Spring element deactivated.
(Integer) |
|
| Ifail |
Failure criteria.
- = 0
- Uni-directional criteria.
- = 1
- Multi-directional criteria.
(Integer) |
|
| Ileng |
Input per unit length
flag. 2
- = 0
- The force in the spring is computed as previously
detailed formula.
- = 1
- All input are per unit length.
(Integer) |
|
| Ifail2 |
Failure model flag.
- = 0 (Default)
- Displacement (or rotation) criteria.
- = 1
- Displacement (or rotation) criteria considering velocity
effect.
- = 2
- Force (or moment) criteria.
- = 3
- Internal energy criteria.
(Integer) |
|
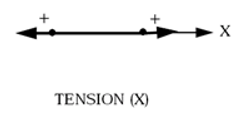
| Ki |
Stiffness
with Ileng=0 or
with Ileng=1.
- If
=1
- Stiffness for tension/compression.
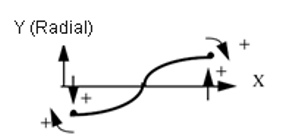
- If
=2
- Stiffness for shear (radial).
(Real) |
or
|
Stiffness
with Ileng=0 or
with Ileng=1.
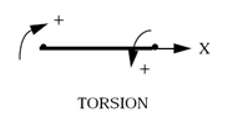
- If
=3
- Stiffness for torsion.
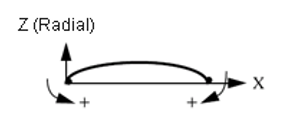
- If
=4
- Stiffness for bending (radial).
(Real) |
or
|
| Ci |
Damping
with Ileng=0 or
with Ileng=1.
- If
=1
- Damping for tension/compression.
- If
=2
- Damping for shear (radial).
(Real) |
or
|
Damping
with Ileng=0 or
with Ileng=1.
- If
=3
- Damping for torsion.
- If
=4
- Damping for bending (radial).
(Real) |
or
|
| Ai |
Coefficient for strain
rate effect.
- If
=1
- Coefficient for tension/compression.
- If
=2
- Coefficient for shear (radial).
Default = 1.0 (Real) |
|
Coefficient for strain
rate effect.
- If
=3
- Coefficient for torsion.
- If
=4
- Coefficient for bending (radial).
Default = 1.0 (Real) |
|
| Bi |
Logarithmic coefficient
for strain rate effect.
- If
=1
- Coefficient for tension/compression.
- If
=2
- Coefficient for shear (radial).
Default = 0.0 (Real) |
|
Logarithmic coefficient
for strain rate effect.
- If
=3
- Coefficient for torsion.
- If
=4
- Coefficient for bending (radial).
Default = 0.0 (Real) |
|
| Di |
Strain coefficients for velocity.
- If
=1
- Coefficient for tension/compression.
- If
=2
- Coefficient for shear (radial).
Default = 1.0 (Real) |
|
Strain coefficients for velocity.
- If
=3
- Coefficient for torsion.
- If
=4
- Coefficient for bending (radial).
Default = 1.0 (Real) |
|
| fct_ID11 |
Stiffness function
identifier.
- = 0
- Linear spring.
- ≠ 0
- Nonlinear spring.
- If
=1
- Stiffness function
in
tension/compression.
- If
=2
- Stiffness function
in shear
(radial).
If Hi
=4: Function
defining upper yield curve for
load index. (Integer) |
|
Stiffness function
identifier.
- = 0
- Linear spring.
- ≠ 0
- Nonlinear spring.
- If
=3
- Stiffness function
in torsion.
- If
=4
- Stiffness function
in bending
(radial).
If Hi
=4: Function
defining upper yield curve for
load index. (Integer) |
|
| Hi |
Hardening flag for
nonlinear spring in different load cases with load index
=1,2,3,4.
- = 0
- Nonlinear elastic spring.
- = 1
- Nonlinear elasto-plastic spring with isotropic
hardening.
- = 2
- Nonlinear elasto-plastic spring with decoupled hardening
in tension and compression.
- = 4
- Nonlinear elastic plastic spring with kinematic
hardening.
- = 5
- Nonlinear elasto-plastic spring with nonlinear
unloading.
- = 6
- Nonlinear elasto-plastic spring with isotropic hardening
and nonlinear unloading.
- = 7
- Nonlinear spring with elastic hysteresis.
(Integer) |
|
| fct_ID2i |
Function defining the
change in force with spring displacement rate in
.
- If
=1
- Function
in
tension/compression.
- If
=2
- Function
in shear (radial).
(Integer) |
|
Function defining the
change in moment with spring rotation rate in
.
- If
=3
- Function
in torsion.
- If
=4
- Function
in bending
(radial).
(Integer) |
|
| fct_ID3i |
Function used only for
unloading in transition direction loading index
=1,2.
- If
Hi=4
- Function identifier defining lower yield curve
(transitional).
- If
Hi=5
- Function identifier defining residual displacement
versus maximum displacement.
- If
Hi=6
- Function identifier defining nonlinear unloading
curve.
- If
Hi=7
- Function identifier defining nonlinear unloading curve
(relative displacement).
(Integer) |
|
Function used only for
unloading in rotational direction loading index
=3,4.
- If
Hi=4
- Function identifier defining lower yield curve
(rotational).
- If
Hi=5
- Function identifier defining residual rotation versus
maximum rotation.
- If
Hi=6
- Function identifier defining nonlinear unloading
curve.
- If
Hi=7
- Function identifier unloading curve for moment versus
rotation (relative rotation).
(Integer) |
|
| fct_ID4i |
Function to consider
velocity or deformation velocity dependency damping in
.
- If
=1
- Function
in
tension/compression.
- If
=2
- Function
in shear (radial).
(Integer) |
|
Function to consider
velocity or deformation velocity dependency damping in
.
- If
=3
- Function
in torsion.
- If
=4
- Function
in bending
(radial).
(Integer) |
|
| Hscalei |
Scale factor to
homogeneous a force for
(fct_ID4i function).
- If
=1
- In tension/compression.
- If
=2
- In shear (radial).
Default = 1.0 (Real) |
|
Scale factor to
homogeneous a moment for
(fct_ID4i function).
- If
=3
- In torsion.
- If
=4
- In bending (radial).
Default = 1.0 (Real) |
|
| Fi |
Scale factor for
(abscissa of
fct_ID2i function for
) in function.
- If
=1
- In tension/compression.
- If
=2
- In shear (radial).
(Real) |
|
Scale factor for
(abscissa of
fct_ID2i function for
) in function.
- If
=3
- In torsion.
- If
=4
- In bending (radial).
(Real) |
|
|
|
Loading index
=1, 2. Negative transitional
failure limit. Default = -1030
(Real) |
|
| If
Ifail2 = 0,
1: Failure displacement in transitional direction. |
|
| If
Ifail2 = 2:
Failure force in transitional direction. |
|
| If
Ifail2 = 3:
Failure internal energy related to transitional direction. |
|
|
|
Loading index
= 3, 4. Negative rotational failure
limit. Default = -1030 (Real) |
|
| If
Ifail2 = 0,
1: Failure rotation in rotational direction. |
|
| If
Ifail2 = 2:
Failure moment in rotational direction. |
|
| If
Ifail2 = 3:
Failure internal energy related to rotational direction. |
|
|
|
Loading index
=1, 2. Positive transitional
failure limit. Default = 1030
(Real) |
|
| If
Ifail2 = 0,
1: Failure displacement in transitional direction. |
|
| If
Ifail2 = 2:
Failure force in transitional direction. |
|
| If
Ifail2 = 3:
Failure internal energy related to transitional direction. |
|
|
|
Loading index
= 3, 4. Positive rotational failure
limit. Default = 1030 (Real) |
|
| If
Ifail2 = 0,
1: Failure rotation in rotational direction. |
|
| If
Ifail2 = 2:
Failure moment in rotational direction. |
|
| If
Ifail2 = 3:
Failure internal energy related to rotational direction. |
|
| Ascalei |
Scale factor for
(abscissa of
fct_ID1i
and fct_ID3i
function for
).
- If
=1
- In tension/compression.
- If
=2
- In shear (radial).
Default = 1.0 (Real) |
|
Scale factor for
(abscissa of
fct_ID1i
and fct_ID3i
function for
).
- If
=3
- In torsion.
- If
=4
- In bending (radial).
Default = 1.0 (Real) |
|
| Ei |
Scale factor for
(fct_ID2i
function). It is the coefficient for strain rate effect (homogeneous
to a force).
- If
=1
- In tension/compression.
- If
=2
- In shear (radial).
(Real) |
|
Scale factor for
(fct_ID2i
function). It is the coefficient for strain rate effect (homogeneous
to a moment).
- If
=3
- In torsion.
- If
=4
- In bending (radial).
(Real) |
|
|
|
Reference translational
velocity. Default = 1.0 (Real) |
|
|
|
Reference rotational
velocity. Default = 1.0 (Real) |
|
| ci |
Relative velocity
coefficient in different load case (with load index
=1,2,3,4). Default = 0.0
(Real) |
|
| If
Ifail2=0,1:
Coefficient for failure displacement with
=1,2. Coefficient for failure
rotation with
=3,4. |
or
|
| If
Ifail2=2:
Coefficient for failure force
=1,2,3. Coefficient for failure
moment
=3,4. |
or
|
| If
Ifail2=3:
Coefficient for failure internal energy
=1,2,3,4. |
|
| ni |
Relative velocity exponent.
- If
=1
- In tension/compression.
- If
=2
- In shear (radial).
- If
=3
- In torsion.
- If
=4
- In bending (radial).
Default = 0.0 (Real) |
|
|
|
"Mult" factor.
- If
=1
- In tension/compression.
- If
=2
- In shear (radial).
- If
=3
- In torsion.
- If
=4
- In bending (radial).
Default = 1.0 (Real) |
|
|
|
Exponent.
- If
=1
- In tension/compression.
- If
=2
- In shear (radial).
- If
=3
- In torsion.
- If
=4
- In bending (radial).
Default = 2.0 (Real) |
|