
ode15i
Solve a system of stiff differential algebraic equations.
Syntax
[t,y] = ode15i(@func,tin,y0,yp0)
[t,y] = ode15i(@func,tin,y0,yp0,options)
[t,y,te,ye,ie] = ode15i(...)
sol = ode15i(...)
Inputs
- func
- The system of equations to solve.
- tin
- The vector of times (or other domain variable) at which to report the solution. If the vector has two elements, then the solver operates in single-step mode and determines the appropriate intermediate steps.
- y0
- The vector of initial conditions.
- yp0
- The vector of initial derivative conditions.
- options
- A struct containing options settings specified via odeset.
Outputs
- t
- The times at which the solution is computed.
- y
- The solution matrix, with the solution at each time stored by row.
- te
- The times at which the 'Events' function recorded a zero value.
- ye
- The system function values corresponding to each te value.
- ie
- The index of the event that recorded each zero value.
- sol
- A struct containing the solution data. The fields are as follows:
- x
- The times at which the solution is computed, stored as row vector.
- y
- The solution matrix, with the solution for each equation in the system stored by row.
- solver
- The solver name.
- xe
- The times at which the 'Events' function recorded a zero value.
- ye
- The system function values corresponding to each xe value.
- ie
- The index of the event that recorded each zero value.
Example
Solve for the location in a mass spring damper system.
function f = MSD(t,y,yp,v,m,k,c)
% y = [x, mD, mS]
f = [0, 0, 0];
f(1) = (y(2)-y(3)) - m*yp(1); % momentum equilibrium
f(2) = y(1) - yp(3)/k; % displacement equilibrium
f(3) = (m*v-y(2)) - y(1)*c; % momentum equilibrium
end
m = 1.6; % mass
v = 1.5; % initial velocity
k = 1.25; % spring constant
c = 1.1; % damping constant
handle = @(t,y,yp) MSD(t,y,yp,v,m,k,c);
t = [0:0.2:12]; % time vector
yi = [0, m*v,0];
ypi = [v, -c*v, 0.0];
[t,y] = ode15i(handle,t,yi,ypi);
x = y(:,1)';
plot(t,x);
xlabel('time');
ylabel('location');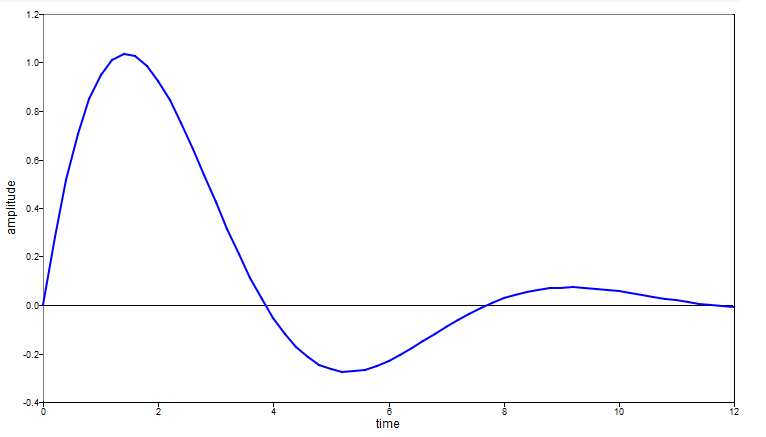
Comments
ode15i solves the system using the backward differentiation formula algorithm from the Sundials IDA library.
To pass additional parameters to a function argument, use an anonymous function.
The odeset options and defaults are as follows.
- RelTol: 1.0e-3
- AbsTol: 1.0e-6
- Jacobian: []
The 'Events' function used with the last three output arguments is specified using odeset.