
AcuSolve Enclosure Radiation
Enclosure Radiation Methodology
- View factor computation: In radiative heat transfer view factor is the proportion of radiation incident on one surface due to another surface. The view factors for each facet defining the radiation enclosure are computed using the hemicube algorithm and smoothed using least squares method as a pre-processing step. The view factors are not recomputed during the simulation.
- Heat flux addition: The radiative heat flux, based on view factors, computed using the Stefan-Boltzmann law and the total radiosity, based on Kirchoff's law, is added to the enthalpy transport equation during the solver run.
The enclosure radiation model is supported only on fluid mediums, that is, the fluid side of the fluid/solid surface.
View factor computation is an important point when dealing with moving mesh simulation. Since the view factors are not recomputed during the solver run the boundary elements forming the enclosure should not deform.
The total emissive power of a grey surface is given by the Stefan-Boltzmann law:
where is the emissivity of surface i, given by an EMISSIVITY_MODEL command; is the Stefan-Boltzmann constant, given by stefan_boltzmann_constant; Ti is the temperature of surface i; and Toff is the offset to convert to an absolute temperature, given by the absolute_temperature_offset parameter of the EQUATION command. In addition, each surface receives part of the total radiosity from each of the radiation surfaces:
where Gi is the total irradiation of the surface i, Fij is the view factor from the surface i to surface j and Jj is the total radiosity from surface j. The total radiosity of surface i is
where is the absorptivity and is the reflectivity. From Kirchhoff' law and the grey surface assumption, . The net radiation heat flux is thus and is added to the temperature equation. The radiation equation solves for all the radiation heat fluxes coupled together with the temperature equation.
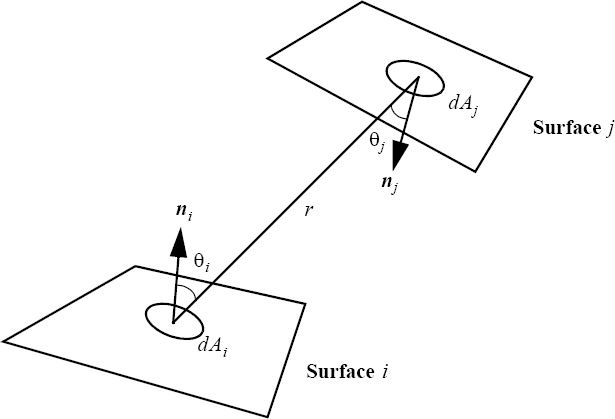
View factors are purely geometric entities defined as
where Ai and Aj are the areas of surfaces i and j, respectively; and are the angles between the line connecting to and the normals to surfaces to ; respectively; r is the distance from to ; and is the visibility function, it is equal to one if to see each other, otherwise it is zero.
View Factor Nomenclature
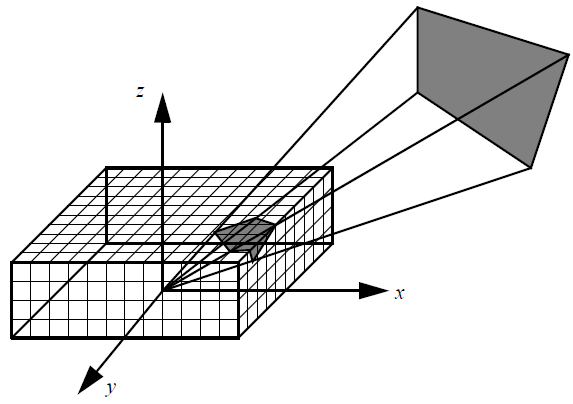
The view factors are computed using the hemicube algorithm. In a nutshell, in this algorithm a hemicube is placed on the centroid of each radiation facet i. The hemicube is discretized into 3n2 pixels; where n is given by num_hemicube_bins. All surfaces (facing surface i) are then projected onto this hemicube. The Z-buffering algorithm is used to compute the visibility. Once all surfaces are projected, the pixels weighted by their view factor increments are added up to determine a row of Fi={Fij}.
Hemicube Discretization
The hemicube algorithm has three major assumptions, and hence sources of errors: aliasing - the true projection of each visible face onto the hemicube can be accurately accounted for by using a finite resolution hemicube; proximity - the distance between faces is great compared to the effective diameter of the faces; and visibility - the visibility between any two faces does not depend on the position within either face. The aliasing error may be reduced through the use of larger num_hemicube_bins values, at the expense of computational cost. The computational cost is proportional to n2 for sufficiently large values of n. In addition, a random jittering algorithm and a non-uniform hemicube pixelization are employed to minimize the aliasing error. The proximity and visibility errors occur when two facing facets are too close to each other. In this case, the geometry of one or both facets cannot be sufficiently well-represented by their centroids. These errors can be reduced by splitting each poorly-represented facet into smaller segments (sub-surfaces), computing the view factors separately for each sub-surface and then adding them up. The computational cost is proportional to the number of sub-surface divisions. The max_surface_subdivision parameter may be used to trade-off accuracy against cost.
A least-squares smoothing is automatically applied to the computed view factor matrix to enforce reciprocity and conservation:
(reciprocity)
(conservation)
The default for the Stefan-Boltzmann constant is given in MKS units: .
In British units it is: .
In general, this constant must be converted to be consistent with the units chosen for use in the problem.