Figure 1 . Note: The detailed DEM simulation sequence is not shown here. For detailed information
about the DEM simulation sequence, refer to the EDEM
help manual.
Note:
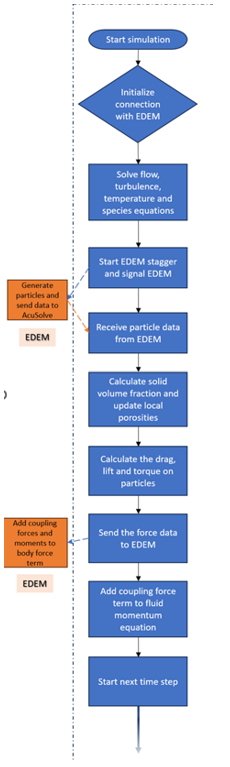
The temperature and species equations are only solved when the heat transfer
and/or mass transfer physics models are active.
Since the DEM time step is usually multiple orders lower than the CFD time
step, the DEM solver loop is repeated multiple times per single CFD time
step to ensure that the physical time is synchronized in both the
solvers.
For coupled simulations, the data is always exchanged in SI units.
For unidirectional coupling, once the coupling forces are calculated and
shared with EDEM , the fluid momentum equation is
not updated with the coupling force because the effect of particles on fluid
is ignored.
AcuSolve -EDEM coupling uses
the Eulerian-Lagrangian approach for modeling fluid-particle flows where the fluid
transport equations are solved in a Eulerian framework and the dispersed phase is
represented as Lagrangian particles. The fluid phase is solved based on the
volume-averaged Navier-Stokes equations and the Discrete Element Method (DEM) is
used for computing the motion of the solid phase. This coupling strategy allows you
to study the momentum and heat transfer at the individual particle scale.
Governing Equations
The volume-averaged Navier-Stokes equations for CFD-DEM momentum coupling are given
by:
∂
(
ε
f
ρ
f
)
∂
t
+
∇
⋅
(
ρ
f
ε
f
v
f
)
=
0
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
WaaSaaa8aabaWdbiabgkGi2kaacIcacqaH1oqzpaWaaSbaaSqaa8qa
caWGMbaapaqabaGccqaHbpGCdaWgaaWcbaGaamOzaaqabaGccaGGPa
aabaWdbiabgkGi2kaadshaaaGaey4kaSIaey4bIeTaeyyXICTaaiik
a8aacqaHbpGCdaWgaaWcbaGaamOzaaqabaGcpeGaeqyTdu2damaaBa
aaleaapeGaamOzaaWdaeqaaGqabOWdbiaa=zhadaWgaaWcbaGaamOz
aaqabaGcpaGaaiyka8qacqGH9aqpcaaIWaaaaa@514F@
∂
∂ t
ε
f
ρ
f
v
f
+ ∇ ⋅
ρ
f
ε
f
v
f
v
f
= −
ε
f
∇ p −
ε
f
∇ ⋅
τ
f
+
ρ
f
ε
f
g −
F
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
WaaSaaa8aabaWdbiabgkGi2cWdaeaapeGaeyOaIyRaamiDaaaadaqa
daWdaeaapeGaeqyTdu2damaaBaaaleaapeGaamOzaaWdaeqaaOWdbi
abeg8aYnaaBaaaleaacaWGMbaabeaaieqak8aacaWF2bWaaSbaaSqa
aiaadAgaaeqaaaGcpeGaayjkaiaawMcaaiabgUcaRiabgEGirlabgw
Sixpaabmaapaqaa8qacqaHbpGCdaWgaaWcbaGaamOzaaqabaGccqaH
1oqzpaWaaSbaaSqaa8qacaWGMbaapaqabaGccaWF2bWaaSbaaSqaai
aadAgaaeqaaOGaa8NDamaaBaaaleaacaWGMbaabeaaaOWdbiaawIca
caGLPaaacqGH9aqpcqGHsislcqaH1oqzpaWaaSbaaSqaa8qacaWGMb
aapaqabaGcpeGaey4bIeTaamiCaiabgkHiTiabew7aL9aadaWgaaWc
baWdbiaadAgaa8aabeaak8qacaGGGcGaey4bIeTaeyyXIC9aaeWaa8
aabaaccmWdbiab+r8a0naaBaaaleaacaWGMbaabeaaaOGaayjkaiaa
wMcaaiabgUcaRiabeg8aYnaaBaaaleaacaWGMbaabeaakiabew7aL9
aadaWgaaWcbaWdbiaadAgaa8aabeaak8qacaWFNbGaeyOeI0ccbmGa
a0Nra8aadaWgaaWcbaWdbiaadchaa8aabeaaaaa@740B@
where,
ε
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaeqyTdu2damaaBaaaleaapeGaamOzaaWdaeqaaOWdbiaacckaaaa@3A33@
v
f
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaGqabiaa=zhada
WgaaWcbaGaamOzaaqabaaaaa@3800@
ρ
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaeqyWdi3damaaBaaaleaapeGaamOzaaWdaeqaaOWdbiaacckaaaa@3A4C@
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamiCaaaa@36FE@
τ
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaGGadabaaaaaaa
aapeGae8hXdq3aaSbaaSqaaiaadAgaaeqaaaaa@38ED@
g
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaGqababaaaaaaa
aapeGaa83zaaaa@36FB@
F
p
=
1
V
c e l l
∑ i
f
d
+
f
l
i
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamOra8aadaWgaaWcbaWdbiaadchaa8aabeaak8qacqGH9aqpcaqG
GcWaaSaaa8aabaWdbiaaigdaa8aabaWdbiaadAfapaWaaSbaaSqaa8
qacaWGJbGaamyzaiaadYgacaWGSbaapaqabaaaaOWdbmaavababeWc
paqaa8qacaWGPbaabeqdpaqaa8qacqGHris5aaGcdaqadaWdaeaape
GaamOza8aadaahaaWcbeqaa8qacaWGKbaaaOGaey4kaSIaamOza8aa
daahaaWcbeqaa8qacaWGSbaaaaGccaGLOaGaayzkaaWdamaaBaaale
aapeGaamyAaaWdaeqaaaaa@4BC0@
V
c e l l
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamOva8aadaWgaaWcbaWdbiaadogacaWGLbGaamiBaiaadYgaa8aa
beaaaaa@3AF2@
f
d
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamOza8aadaahaaWcbeqaa8qacaWGKbaaaaaa@3829@
f
l
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamOza8aadaahaaWcbeqaa8qacaWGSbaaaaaa@3831@
Note: Wherever applicable the following notations are used throughout the
document. The subscript
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamOzaaaa@36F4@
denotes a fluid property,
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamiCaaaa@36FE@
denotes a particle property and
i
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamyAaaaa@36F7@
denotes that the calculation is done for an
individual particle.
The drag force on each particle is given by:
f
i
d
=
β
D
V
p
d
p
(
v
s
l
i
p
)
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOzamaaDa
aaleaacaWGPbaabaGaamizaaaakiabg2da9iabek7aInaaCaaaleqa
baGaamiraaaakmaalaaabaGaamOvamaaBaaaleaacaWGWbaabeaaaO
qaaiaadsgadaWgaaWcbaGaamiCaaqabaaaaOGaaiikaiaahAhadaWg
aaWcbaGaam4CaiaadYgacaWGPbGaamiCaaqabaGccaGGPaaaaa@4717@
v
s
l
i
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaiaahAhadaWgaa
WcbaGaam4CaiaadYgacaWGPbGaamiCaaqabaaaaa@3AE0@
(
v
f
−
v
p
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaaeaaaaaaaaa8
qacaWH2bWaaSbaaSqaaiaadAgaaeqaaOGaeyOeI0IaaCODamaaBaaa
leaacaWGWbaabeaaaaa@3B40@
)
V
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOvamaaBa
aaleaacaWGWbaabeaaaaa@37F0@
d
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamizamaaBa
aaleaacaWGWbaabeaaaaa@37FE@
Where the formulation of the interphase momentum exchange coefficient (
β
D
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOSdi2aaW
baaSqabeaacaWGebaaaaaa@388B@
AcuSolve -EDEM
coupling are listed below.
Drag Models
Ergun-Wen YuThe momentum exchange coefficient for the Ergun Wen Yu drag model is given
by,
β
W e n Y u
D
=
3
4
C
d
ρ
f
v
s l i p
ε
f
− 1.65
ε
f
≥ 0.8
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaaeaaaaaaaaa8
qacqaHYoGydaqhaaWcbaGaam4vaiaadwgacaWGUbGaamywaiaadwha
aeaacaWGebaaaOGaeyypa0ZaaSaaaeaacaaIZaaabaGaaGinaaaaca
WGdbWaaSbaaSqaaiaadsgaaeqaaOGaeqyWdi3aaSbaaSqaaiaadAga
aeqaaOWaaqWaaeaapaGaaCODamaaBaaaleaacaWGZbGaamiBaiaadM
gacaWGWbaabeaaaOWdbiaawEa7caGLiWoacqaH1oqzdaqhaaWcbaGa
amOzaaqaaiabgkHiTiaaigdacaGGUaGaaGOnaiaaiwdaaaGccaaMf8
UaaGzbVlaaywW7caaMf8UaaGzbV=aacqaH1oqzdaWgaaWcbaWdbiaa
dAgaa8aabeaakiabgwMiZ+qacaaIWaGaaiOlaiaaiIdaaaa@6242@
Where, the coefficients A and B have a default value of 150 and 1.75 respectively and can be
modified by you while specifying the model inputs.
v
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaGqababaaaaaaa
aapeGaa8NDa8aadaWgaaWcbaWdbiaadchaa8aabeaaaaa@3859@
d
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaamiza8aadaWgaaWcbaWdbiaadchaa8aabeaaaaa@3841@
φ
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOXdOgaaa@37B1@
Here
Re
i
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaaeOuaiaabwgadaWgaaWcbaGaamyAaaqabaaaaa@38E0@
C
d
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaam4qa8aadaWgaaWcbaWdbiaadsgaa8aabeaaaaa@3814@
Re
i
=
ρ
f
ε
f
v
s
l
i
p
d
p
μ
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaciOuaiaacwgadaWgaaWcbaGaamyAaaqabaGccqGH9aqpdaWcaaWd
aeaapeGaeqyWdi3damaaBaaaleaapeGaamOzaaWdaeqaaOWdbiabew
7aL9aadaWgaaWcbaWdbiaadAgaa8aabeaak8qadaabdaWdaeaacaWH
2bWaaSbaaSqaaiaadohacaWGSbGaamyAaiaadchaaeqaaaGcpeGaay
5bSlaawIa7aiaadsgapaWaaSbaaSqaa8qacaWGWbaapaqabaaakeaa
peGaeqiVd02damaaBaaaleaapeGaamOzaaWdaeqaaaaaaaa@4DD7@
The Ergun-Wen-Yu model is one of
the most widely used drag models and is recommended for most of the
fluid-particle flows since it works well for both dense phase and dilute
phase regimes. In this model, the Ergun equation is used for fluid
volume fractions less than 0.8 and the Wen-Yu equation for fluid volume
fractions greater than 0.8.
Di FeliceThe momentum exchange coefficient for the DiFelice drag model is
given by,
β
d
i
F
e
l
i
c
e
D
=
3
4
C
d
ρ
f
v
s
l
i
p
ε
f
(
2
−
χ
)
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaaeaaaaaaaaa8
qacqaHYoGydaqhaaWcbaGaamizaiaadMgacaWGgbGaamyzaiaadYga
caWGPbGaam4yaiaadwgaaeaacaWGebaaaOGaeyypa0ZaaSaaaeaaca
aIZaaabaGaaGinaaaacaWGdbWaaSbaaSqaaiaadsgaaeqaaOGaeqyW
di3aaSbaaSqaaiaadAgaaeqaaOWaaqWaaeaapaGaaCODamaaBaaale
aacaWGZbGaamiBaiaadMgacaWGWbaabeaaaOWdbiaawEa7caGLiWoa
cqaH1oqzdaqhaaWcbaGaamOzaaqaaiaacIcacaaIYaGaeyOeI0Iaeq
4XdmMaaiykaaaaaaa@5704@
χ
=
0
Re
i
=
0
3.7
−
0.65
e
(
−
0.5
(
1.5
−
log
10
Re
i
)
2
)
Re
i
≠
0
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaqcaameaaaaaa
aaa8qacqaHhpWycqGH9aqpkmaaceaaeaqabeaacaaIWaGaaGzbVlaa
ywW7caaMf8UaaGzbVlaaywW7caaMf8UaaGzbVlaaywW7caaMf8UaaG
zbVlaaywW7caaMf8UaaGzbVlaaywW7caaMf8UaciOuaiaacwgadaWg
aaWcbaGaamyAaaqabaGccqGH9aqpcaaIWaaabaqcaaSaaG4maiaac6
cacaaI3aGaeyOeI0IaaGimaiaac6cacaaI2aGaaGynaiaadwgakmaa
CaaajeaWbeqaaiaacIcacqGHsislcaaIWaGaaiOlaiaaiwdacaGGOa
GaaGymaiaac6cacaaI1aGaeyOeI0IaciiBaiaac+gacaGGNbWcdaWg
aaqccaCaaiaaigdacaaIWaaabeaajeaWciGGsbGaaiyzaSWaaSbaaK
GaahaacaWGPbaabeaajeaWcaGGPaWcdaahaaqccaCabeaacaaIYaaa
aKqaalaacMcaaaGccaaMf8UaaGzbVlaaywW7caaMf8UaciOuaiaacw
gadaWgaaWcbaGaamyAaaqabaGccqGHGjsUcaaIWaaaaiaawUhaaaaa
@81A5@
C
d
=
0
Re
i
=
0
0.63
+
4.8
Re
i
−
0.5
2
Re
i
≠
0
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaqcaakeaaaaaa
aaa8qacaWGdbGcdaWgaaWcbaGaamizaaqabaGccqGH9aqpdaGabaab
aeqabaGaaGimaiaaywW7caaMf8UaaGzbVlaaywW7caaMf8UaaGzbVl
aaywW7caaMf8UaaGPaVlaaysW7caaMc8UaaGPaVlaayIW7ciGGsbGa
aiyzamaaBaaaleaacaWGPbaabeaakiabg2da9iaaicdaaeaadaqada
qaaiaaicdacaGGUaGaaGOnaiaaiodacqGHRaWkcaaI0aGaaiOlaiaa
iIdacaaMe8UaciOuaiaacwgadaqhaaWcbaGaamyAaaqaaiabgkHiTi
aaicdacaGGUaGaaGynaaaaaOGaayjkaiaawMcaamaaCaaaleqabaGa
aGOmaaaakiaaywW7caaMf8UaciOuaiaacwgadaWgaaWcbaGaamyAaa
qabaGccqGHGjsUcaaIWaaaaiaawUhaaaaa@6CE8@
Unlike the Ergun-Wen-Yu
correlation, the Di Felice correlation is a monotonic function of
Reynolds number and porosity and does not have the step change in drag
force evaluation.
BeetstraThe momentum exchange coefficient for the Beetstra drag model is
given by,
β
B
e
e
t
s
t
r
a
D
=
A
μ
f
ε
f
d
p
+
B
μ
f
Re
i
d
p
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaaeaaaaaaaaa8
qacqaHYoGydaqhaaWcbaGaamOqaiaadwgacaWGLbGaamiDaiaadoha
caWG0bGaamOCaiaadggaaeaacaWGebaaaOGaeyypa0ZaaSaaaeaaca
WGbbWdaiabeY7aTnaaBaaaleaapeGaamOzaaWdaeqaaaGcpeqaaiab
ew7aL9aadaWgaaWcbaWdbiaadAgaa8aabeaak8qacaWGKbWdamaaDa
aaleaapeGaamiCaaWdaeaaaaaaaOWdbiabgUcaRmaalaaabaGaamOq
a8aacqaH8oqBdaWgaaWcbaWdbiaadAgaa8aabeaak8qaciGGsbGaai
yzamaaBaaaleaacaWGPbaabeaaaOqaaiaadsgadaqhaaWcbaGaamiC
aaqaaaaaaaaaaa@541E@
A
=
180
(
1
−
ε
f
)
+
18
ε
f
4
1
+
1.5
(
1
−
ε
f
)
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyqaiabg2
da9iaaigdacaaI4aGaaGimaiaacIcacaaIXaGaeyOeI0IaeqyTdu2a
aSbaaSqaaiaadAgaaeqaaOGaaiykaiabgUcaRiaaigdacaaI4aGaeq
yTdu2aa0baaSqaaiaadAgaaeaacaaI0aaaaOWaaeWaaeaacaaIXaGa
ey4kaSIaaGymaiaac6cacaaI1aWaaOaaaeaacaGGOaGaaGymaiabgk
HiTiabew7aLnaaBaaaleaacaWGMbaabeaakiaacMcaaSqabaaakiaa
wIcacaGLPaaaaaa@50E6@
B =
0.31 (
ε
f
− 1
+ 3 ( 1 −
ε
f
)
ε
f
+ 8.4
Re
i
− 0.343
)
1 +
10
3 ( 1 −
ε
f
)
Re
i
2
ε
f
− 2.5
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOqaiabg2
da9maalaaabaGaaGimaiaac6cacaaIZaGaaGymaiaacIcacqaH1oqz
daqhaaWcbaGaamOzaaqaaiabgkHiTiaaigdaaaGccqGHRaWkcaaIZa
GaaiikaiaaigdacqGHsislcqaH1oqzdaWgaaWcbaGaamOzaaqabaGc
caGGPaGaeqyTdu2aaSbaaSqaaiaadAgaaeqaaOGaey4kaSIaaGioai
aac6cacaaI0aGaciOuaiaacwgadaqhaaWcbaGaamyAaaqaaiabgkHi
TiaaicdacaGGUaGaaG4maiaaisdacaaIZaaaaOGaaiykaaqaaiaaig
dacqGHRaWkcaaIXaGaaGimamaaCaaaleqabaGaaG4maiaacIcacaaI
XaGaeyOeI0IaeqyTdu2aaSbaaWqaaiaadAgaaeqaaSGaaiykaaaaki
GackfacaGGLbWaa0baaSqaaiaadMgaaeaacaaIYaGaeqyTdu2aaSba
aWqaaiaadAgaaeqaaSGaeyOeI0IaaGOmaiaac6cacaaI1aaaaaaaaa
a@6887@
RongThe momentum exchange coefficient for the Rong drag model is given
by,
β
R
o
n
g
D
=
150
(
1
−
ε
f
)
μ
f
ε
f
d
p
φ
2
+
3
4
ρ
f
v
s
l
i
p
φ
ε
f
<
0.8
3
4
C
d
ρ
f
v
s
l
i
p
ε
f
2
−
σ
−
λ
ε
f
≥
0.8
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaeqOSdi2aa0baaSqaaiaadkfacaWGVbGaamOBaiaadEgaaeaacaWG
ebaaaOGaeyypa0Zaaiqaaqaabeqaa8aadaWcaaqaa8qacaaIXaGaaG
ynaiaaicdacaGGOaGaaGymaiabgkHiT8aacqaH1oqzdaWgaaWcbaGa
amOzaaqabaGccaGGPaGaeqiVd02aaSbaaSqaaiaadAgaaeqaaaGcba
GaeqyTdu2aaSbaaSqaaiaadAgaaeqaaOGaamizamaaBaaaleaacaWG
WbaabeaakiabeA8aQnaaCaaaleqabaGaaGOmaaaaaaGccqGHRaWkda
WcaaqaaiaaiodaaeaacaaI0aaaamaalaaabaWdbiabeg8aYnaaBaaa
leaacaWGMbaabeaakmaaemaapaqaaiaahAhadaWgaaWcbaGaam4Cai
aadYgacaWGPbGaamiCaaqabaaak8qacaGLhWUaayjcSdaapaqaaiab
eA8aQbaacaaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8
UaaGPaVlaaxMaacqaH1oqzdaWgaaWcbaGaamOzaaqabaGccqGH8aap
caaIWaGaaiOlaiaaiIdaa8qabaWaaSaaaeaacaaIZaaabaGaaGinaa
aacaWGdbWdamaaBaaaleaapeGaamizaaWdaeqaaOWdbiabeg8aYnaa
BaaaleaacaWGMbaabeaakmaaemaapaqaaiaahAhadaWgaaWcbaGaam
4CaiaadYgacaWGPbGaamiCaaqabaaak8qacaGLhWUaayjcSdGaeqyT
du2damaaDaaaleaapeGaamOzaaWdaeaapeGaaGOmaiabgkHiTiabeo
8aZjabgkHiTiabeU7aSbaak8aacaWLjaGaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaxMaacqaH1oqzdaWgaaWc
baGaamOzaaqabaGccqGHLjYScaaIWaGaaiOlaiaaiIdaaaWdbiaawU
haaaaa@AC4E@
where,
σ
=
2.65
ε
f
+
1
−
5.3
−
3.5
ε
f
ε
f
2
e
−
(
1.5
−
log
10
Re
i
)
2
2
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaeq4WdmNaeyypa0JaaGOmaiaac6cacaaI2aGaaGynamaabmaapaqa
a8qacqaH1oqzpaWaaSbaaSqaa8qacaWGMbaapaqabaGcpeGaey4kaS
IaaGymaaGaayjkaiaawMcaaiabgkHiTmaabmaapaqaa8qacaaI1aGa
aiOlaiaaiodacqGHsislcaaIZaGaaiOlaiaaiwdacqaH1oqzpaWaaS
baaSqaa8qacaWGMbaapaqabaaak8qacaGLOaGaayzkaaGaaiiOaiab
ew7aL9aadaqhaaWcbaWdbiaadAgaa8aabaWdbiaaikdaaaGcpaGaaG
PaV=qacaWGLbWdamaaCaaaleqabaWdbmaadmaapaqaa8qacqGHsisl
daWcaaWdaeaapeGaaiikaiaaigdacaGGUaGaaGynaiabgkHiTiGacY
gacaGGVbGaai4za8aadaWgaaadbaWdbiaaigdacaaIWaaapaqabaWc
peGaaeOuaiaabwgadaWgaaadbaGaamyAaaqabaWccaGGPaWdamaaCa
aameqabaWdbiaaikdaaaaal8aabaWdbiaaikdaaaaacaGLBbGaayzx
aaaaaaaa@65E1@
λ
=
1
−
φ
C
−
D
e
−
0.5
3.5
−
log
10
Re
i
2
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaeq4UdWMaeyypa0ZaaeWaa8aabaWdbiaaigdacqGHsislcqaHgpGA
aiaawIcacaGLPaaadaqadaWdaeaapeGaam4qaiabgkHiTiaadseaca
aMb8UaaGzaVlaaykW7caaMc8Uaamyza8aadaahaaWcbeqaa8qacqGH
sislcaaIWaGaaiOlaiaaiwdadaqadaWdaeaapeGaaG4maiaac6caca
aI1aGaeyOeI0IaciiBaiaac+gacaGGNbWdamaaBaaameaapeGaaGym
aiaaicdaa8aabeaal8qacaqGsbGaaeyzamaaBaaameaacaWGPbaabe
aaaSGaayjkaiaawMcaa8aadaahaaadbeqaa8qacaaIYaaaaSGaaiiO
aaaaaOGaayjkaiaawMcaaaaa@5B11@
C
=
39
φ
−
20.6
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaam4qaiabg2da9iaacckacaaIZaGaaGyoaiabeA8aQjabgkHiTiaa
ikdacaaIWaGaaiOlaiaaiAdaaaa@400C@
D
=
101.8
φ
−
0.81
2
+
2.4
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaamiraiabg2da9iaaigdacaaIWaGaaGymaiaac6cacaaI4aWaaeWa
a8aabaWdbiabeA8aQjabgkHiTiaaicdacaGGUaGaaGioaiaaigdaai
aawIcacaGLPaaapaWaaWbaaSqabeaapeGaaGOmaaaakiabgUcaRiaa
ikdacaGGUaGaaGinaaaa@46D7@
φ
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaeqOXdOgaaa@37C6@
Since the sphericity of the particle is considered while
calculating the drag force, this model is strongly recommended for
non-spherical particles compared to the other models available in
AcuSolve .
Syamlal-O’BrienThe momentum exchange coefficient for the Syamlal-O’Brien
drag model is given by,
β
S
y
a
m
l
a
l
D
=
3
4
C
d
ε
f
ρ
f
v
s
l
i
p
v
r
,
p
2
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaiabek7aInaaDa
aaleaacaWGtbGaamyEaiaadggacaWGTbGaamiBaiaadggacaWGSbaa
baGaamiraaaakabaaaaaaaaapeGaeyypa0ZaaSaaaeaacaaIZaaaba
GaaGinaaaadaWcaaWdaeaapeGaam4qa8aadaWgaaWcbaWdbiaadsga
a8aabeaak8qacqaH1oqzpaWaaSbaaSqaa8qacaWGMbaapaqabaGccq
aHbpGCdaWgaaWcbaGaamOzaaqabaGcdaabdaqaaiaahAhadaWgaaWc
baGaam4CaiaadYgacaWGPbGaamiCaaqabaaakiaawEa7caGLiWoaae
aaieqapeGaa8NDa8aadaqhaaWcbaWdbiaadkhacaGGSaGaamiCaaWd
aeaapeGaaGOmaaaaaaaaaa@56D3@
where,
C
d
=
0
Re
i
= 0
0.63 +
4.8
Re
i
v
r , p
2
Re
i
≠ 0
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaam4qa8aadaWgaaWcbaWdbiaadsgaa8aabeaak8qacqGH9aqpcaGG
GcWaaiqaaqaabeqaaiaaicdacaaMf8UaaGzbVlaaywW7caaMf8UaaG
zbVlaaywW7caaMf8UaaGzbVlaaywW7caaMf8UaaGzbVlaaywW7ciGG
sbGaaiyzamaaBaaaleaacaWGPbaabeaakiabg2da9iaaicdaaeaada
qadaWdaeaapeGaaGimaiaac6cacaaI2aGaaG4maiabgUcaRmaalaaa
paqaa8qacaaI0aGaaiOlaiaaiIdaa8aabaWdbmaakaaapaqaa8qada
WccaWdaeaapeGaaeOuaiaabwgapaWaaSbaaSqaa8qacaWGPbaapaqa
baaakeaaieqapeGaa8NDa8aadaWgaaWcbaWdbiaadkhacaGGSaGaam
iCaaWdaeqaaaaaa8qabeaaaaaakiaawIcacaGLPaaapaWaaWbaaSqa
beaapeGaaGOmaaaak8aacaaMf8UaaGzbVlaaywW7caaMf8UaaGzbVl
GackfacaGGLbWaaSbaaSqaaiaadMgaaeqaaOGaeyiyIKRaaGimaaaa
peGaay5Eaaaaaa@7160@
v
r
,
p
=
0.5
A
−
0.06
Re
i
+
0.0036
Re
i
2
+
0.12
Re
i
2
B
−
A
+
A
2
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaGqababaaaaaaa
aapeGaa8NDa8aadaWgaaWcbaWdbiaadkhacaGGSaGaamiCaaWdaeqa
aOWdbiabg2da9iaaicdacaGGUaGaaGynamaabmaapaqaa8qacaWGbb
GaeyOeI0IaaGimaiaac6cacaaIWaGaaGOnaiaabkfacaqGLbWdamaa
BaaaleaapeGaamyAaaWdaeqaaOWdbiabgUcaRmaakaaapaqaa8qada
qadaWdaeaapeGaaGimaiaac6cacaaIWaGaaGimaiaaiodacaaI2aGa
ciOuaiaacwgadaqhaaWcbaGaamyAaaqaaiaaikdaaaaakiaawIcaca
GLPaaacqGHRaWkcaaIWaGaaiOlaiaaigdacaaIYaGaaeOuaiaabwga
paWaaSbaaSqaa8qacaWGPbaapaqabaGcpeWaaeWaa8aabaWdbiaaik
dacaWGcbGaeyOeI0IaamyqaaGaayjkaiaawMcaaiabgUcaRiaadgea
paWaaWbaaSqabeaapeGaaGOmaaaaaeqaaaGccaGLOaGaayzkaaaaaa@5FDF@
A
=
ε
f
4.14
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaamyqaiabg2da9iaacckacqaH1oqzpaWaa0baaSqaa8qacaWGMbaa
paqaa8qacaaI0aGaaiOlaiaaigdacaaI0aaaaaaa@3EDF@
B
=
0.8
ε
f
1.28
ε
f
≤
0.85
ε
f
2.65
ε
f
>
0.85
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamOqaiabg2da9iaacckadaGabaWdaeaafaqabeGabaaabaWdbiaa
icdacaGGUaGaaGioaiabew7aL9aadaqhaaWcbaWdbiaadAgaa8aaba
WdbiaaigdacaGGUaGaaGOmaiaaiIdaaaGccaGGGcGaaGPaVlaaykW7
caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlabew7aL9aadaWgaaWcbaWdbiaadAgaa8aabeaak8qacqGHKj
YOcaaIWaGaaiOlaiaaiIdacaaI1aaapaqaa8qacqaH1oqzpaWaa0ba
aSqaa8qacaWGMbaapaqaa8qacaaIYaGaaiOlaiaaiAdacaaI1aaaaO
GaaiiOaiaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7
caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7cqaH1oqzpaWaaSbaaSqaa8qacaWGMbaapaqabaGccq
GH+aGppeGaaGimaiaac6cacaaI4aGaaGynaiaaykW7aaaacaGL7baa
aaa@9ECD@
Wen-YuThe momentum exchange coefficient for the Wen-Yu drag model is
given by,
β
W
e
n
Y
u
D
=
3
4
C
d
ε
f
−
1.65
ρ
f
v
s
l
i
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaiabek7aInaaDa
aaleaacaWGxbGaamyzaiaad6gacaWGzbGaamyDaaqaaiaadseaaaGc
qaaaaaaaaaWdbiabg2da9iaacckadaWcaaqaaiaaiodaaeaacaaI0a
aaa8aacaWGdbWaaSbaaSqaaiaadsgaaeqaaOWdbiabew7aL9aadaqh
aaWcbaWdbiaadAgaa8aabaWdbiabgkHiTiaaigdacaGGUaGaaGOnai
aaiwdaaaGcpaGaeqyWdi3aaSbaaSqaaiaadAgaaeqaaOWaaqWaaeaa
caWH2bWaaSbaaSqaaiaadohacaWGSbGaamyAaiaadchaaeqaaaGcca
GLhWUaayjcSdaaaa@54E9@
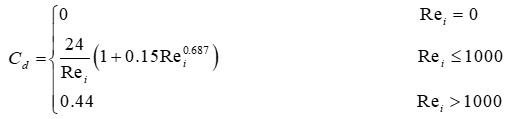
Schiller NaumanThe momentum exchange coefficient for the Schiller Nauman
drag model is given by,
β
S
c
h
i
l
l
e
r
D
=
3
4
C
d
ρ
f
v
s
l
i
p
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaiabek7aInaaDa
aaleaacaWGtbGaam4yaiaadIgacaWGPbGaamiBaiaadYgacaWGLbGa
amOCaaqaaiaadseaaaGcqaaaaaaaaaWdbiabg2da9iaacckadaWcaa
qaaiaaiodaaeaacaaI0aaaa8aacaWGdbWaaSbaaSqaaiaadsgaaeqa
aOGaeqyWdi3aaSbaaSqaaiaadAgaaeqaaOWaaqWaaeaacaWH2bWaaS
baaSqaaiaadohacaWGSbGaamyAaiaadchaaeqaaaGccaGLhWUaayjc
Sdaaaa@50B6@
C
d
=
0
Re
i
=
0
24
1
+
0.15
Re
i
0.687
Re
i
≤
1000
0.44
Re
i
>
1000
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4qamaaBa
aaleaacaWGKbaabeaakiabg2da9maaceaaeaqabeaacaaIWaGaaGzb
VlaaywW7caaMf8UaaGzbVlaaywW7caaMf8UaaGzbVlaaywW7caaMf8
UaciOuaiaacwgadaWgaaWcbaGaamyAaaqabaGccqGH9aqpcaaIWaaa
baGaaGOmaiaaisdadaqadaqaaiaaigdacqGHRaWkcaaIWaGaaiOlai
aaigdacaaI1aGaciOuaiaacwgadaqhaaWcbaGaamyAaaqaaiaaicda
caGGUaGaaGOnaiaaiIdacaaI3aaaaaGccaGLOaGaayzkaaGaaGzbVl
aaywW7ciGGsbGaaiyzamaaBaaaleaacaWGPbaabeaakiabgsMiJkaa
igdacaaIWaGaaGimaiaaicdaaeaacaaIWaGaaiOlaiaaisdacaaI0a
GaaGzbVlaaywW7caaMf8UaaGzbVlaaywW7caaMf8UaaGzbVlaaywW7
ciGGsbGaaiyzamaaBaaaleaacaWGPbaabeaakiabg6da+iaaigdaca
aIWaGaaGimaiaaicdaaaGaay5Eaaaaaa@7C48@
The drag force calculated does not
consider the effect of surrounding particles, that is, volume fraction
is not accounted for, and hence this model is strictly valid only for
dilute phase flows.
Non-Spherical Drag Coefficient Models
The effect of the particle’s shape can be taken into account by using non-spherical
drag coefficient models. There are two types of models available in
AcuSolve which are listed below. If the non-spherical drag
coefficient model is set to none then the particles are assumed to be of spherical
shape. But when the drag coefficient model is set to either of the models listed
below, the drag coefficient in the drag models will be replaced by the non-spherical
drag coefficient.
Isometric (Haider Levenspiel)In this model the drag coefficient is a
function of particle Reynolds number and sphericity. The instantaneous
orientation of the particle is not considered. This type of model is
applicable for particles with shapes closer to a sphere, such as rocks
and some grains (beans), and when the orientation of the particles is
not critical. The user inputs required for this model are particle’s
volume and sphericity. The Haider-Levenspiel correlation is given
by:
Re
c
=
min
(
Re
i
,
2.5999
e
5
)
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaciOuaiaacw
gadaWgaaWcbaGaam4yaaqabaGccqGH9aqpciGGTbGaaiyAaiaac6ga
caaMc8UaaiikaiGackfacaGGLbWaaSbaaSqaaiaadMgaaeqaaOGaai
ilaiaaykW7caaMc8UaaGOmaiaac6cacaaI1aGaaGyoaiaaiMdacaaI
5aGaamyzaiaaiwdacaaMc8Uaaiykaaaa@4DE3@
Where the constants
A
1-4 are dependent on the sphericity (
φ
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOXdOgaaa@37B1@
) of the particle.
Table 1 .
φ
<
0.67
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOXdOMaey
ipaWJaaGimaiaac6cacaaI2aGaaG4naaaa@3BA2@
0.67
≤
φ
<
0.99999
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaaGimaiaac6
cacaaI2aGaaG4naiabgsMiJkabeA8aQjabgYda8iaaicdacaGGUaGa
aGyoaiaaiMdacaaI5aGaaGyoaiaaiMdaaaa@4292@
φ
≥
0.99999
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOXdOMaey
yzImRaaGimaiaac6cacaaI5aGaaGyoaiaaiMdacaaI5aGaaGyoaaaa
@3EB2@
A
1
=
e
2.3288
−
6.4581
φ
+
2.4486
φ
2
A
2
=
0.0964
+
0.5565
φ
A
3
=
e
4.905
−
13.8944
φ
+
18.4222
φ
2
−
10.2599
φ
3
A
4
=
e
1.4681
+
12.2584
φ
−
20.7322
φ
2
+
15.8855
φ
3
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOabaeqabaaeaaaaaa
aaa8qacaWGbbWdamaaBaaaleaapeGaaGymaaWdaeqaaOWdbiabg2da
9iaadwgapaWaaWbaaSqabeaapeWaaeWaa8aabaWdbiaaikdacaGGUa
GaaG4maiaaikdacaaI4aGaaGioaiabgkHiTiaaiAdacaGGUaGaaGin
aiaaiwdacaaI4aGaaGymaiabeA8aQjabgUcaRiaaikdacaGGUaGaaG
inaiaaisdacaaI4aGaaGOnaiabeA8aQ9aadaqhaaadbaaabaWdbiaa
ikdaaaaaliaawIcacaGLPaaaaaaak8aabaWdbiaadgeapaWaaSbaaS
qaa8qacaaIYaaapaqabaGcpeGaeyypa0JaaGimaiaac6cacaaIWaGa
aGyoaiaaiAdacaaI0aGaey4kaSIaaGimaiaac6cacaaI1aGaaGynai
aaiAdacaaI1aGaeqOXdOgabaGaamyqa8aadaWgaaWcbaWdbiaaioda
a8aabeaak8qacqGH9aqpcaWGLbWdamaaCaaaleqabaWdbmaabmaapa
qaa8qacaaI0aGaaiOlaiaaiMdacaaIWaGaaGynaiabgkHiTiaaigda
caaIZaGaaiOlaiaaiIdacaaI5aGaaGinaiaaisdacqaHgpGAcqGHRa
WkcaaIXaGaaGioaiaac6cacaaI0aGaaGOmaiaaikdacaaIYaGaeqOX
dO2aaWbaaWqabeaacaaIYaaaaSGaeyOeI0IaaGymaiaaicdacaGGUa
GaaGOmaiaaiwdacaaI5aGaaGyoaiabeA8aQnaaCaaameqabaGaaG4m
aaaaaSGaayjkaiaawMcaaaaaaOWdaeaapeGaamyqa8aadaWgaaWcba
Wdbiaaisdaa8aabeaak8qacqGH9aqpcaWGLbWdamaaCaaaleqabaWd
bmaabmaapaqaa8qacaaIXaGaaiOlaiaaisdacaaI2aGaaGioaiaaig
dacqGHRaWkcaaIXaGaaGOmaiaac6cacaaIYaGaaGynaiaaiIdacaaI
0aGaeqOXdOMaeyOeI0IaaGOmaiaaicdacaGGUaGaaG4naiaaiodaca
aIYaGaaGOmaiabeA8aQnaaCaaameqabaGaaGOmaaaaliabgUcaRiaa
igdacaaI1aGaaiOlaiaaiIdacaaI4aGaaGynaiaaiwdacqaHgpGAda
ahaaadbeqaaiaaiodaaaaaliaawIcacaGLPaaaaaaaaaa@A4A7@
A
1
=
8.1761
e
−
4.0655
φ
A
2
=
0.0964
+
0.5565
φ
A
3
=
73.69
e
−
5.0748
φ
A
4
=
5.378
e
6.2122
φ
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOabaeqabaaeaaaaaa
aaa8qacaWGbbWdamaaBaaaleaapeGaaGymaaWdaeqaaOWdbiabg2da
9iaaiIdacaGGUaGaaGymaiaaiEdacaaI2aGaaGymaiaadwgapaWaaW
baaSqabeaapeWaaeWaa8aabaWdbiabgkHiTiaaisdacaGGUaGaaGim
aiaaiAdacaaI1aGaaGynaiabeA8aQbGaayjkaiaawMcaaaaaaOWdae
aapeGaamyqa8aadaWgaaWcbaWdbiaaikdaa8aabeaak8qacqGH9aqp
caaIWaGaaiOlaiaaicdacaaI5aGaaGOnaiaaisdacqGHRaWkcaaIWa
GaaiOlaiaaiwdacaaI1aGaaGOnaiaaiwdacqaHgpGAaeaacaWGbbWd
amaaBaaaleaapeGaaG4maaWdaeqaaOWdbiabg2da9iaaiEdacaaIZa
GaaiOlaiaaiAdacaaI5aGaamyza8aadaahaaWcbeqaa8qadaqadaWd
aeaapeGaeyOeI0IaaGynaiaac6cacaaIWaGaaG4naiaaisdacaaI4a
GaeqOXdOgacaGLOaGaayzkaaaaaaGcpaqaa8qacaWGbbWdamaaBaaa
leaapeGaaGinaaWdaeqaaOWdbiabg2da9iaaiwdacaGGUaGaaG4mai
aaiEdacaaI4aGaamyza8aadaahaaWcbeqaa8qadaqadaWdaeaapeGa
aGOnaiaac6cacaaIYaGaaGymaiaaikdacaaIYaGaeqOXdOgacaGLOa
Gaayzkaaaaaaaaaa@7674@
A
1
=
0.1806
A
2
=
0.6459
A
3
=
0.4251
A
4
=
6880.95
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOabaeqabaaeaaaaaa
aaa8qacaWGbbWdamaaBaaaleaapeGaaGymaaWdaeqaaOWdbiabg2da
9iaaicdacaGGUaGaaGymaiaaiIdacaaIWaGaaGOnaaWdaeaapeGaam
yqa8aadaWgaaWcbaWdbiaaikdaa8aabeaak8qacqGH9aqpcaaIWaGa
aiOlaiaaiAdacaaI0aGaaGynaiaaiMdaaeaacaWGbbWdamaaBaaale
aapeGaaG4maaWdaeqaaOWdbiabg2da9iaaicdacaGGUaGaaGinaiaa
ikdacaaI1aGaaGymaaWdaeaapeGaamyqa8aadaWgaaWcbaWdbiaais
daa8aabeaak8qacqGH9aqpcaaI2aGaaGioaiaaiIdacaaIWaGaaiOl
aiaaiMdacaaI1aaaaaa@54A3@
Non-spherical (Ganser and Holzer-Sommerfeld)The Ganser and
Holzer-Sommerfeld models consider both the shape and orientation of the
particle. Since the orientation of the particles is also considered,
this model is applicable to particle shapes such as disk, ellipsoid and
elongated cylinder. The user inputs for these models are volume and
aspect ratio of the particles.
The Ganser correlation is given
by:
Here
k
1
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaam4Aa8aadaWgaaWcbaWdbiaaigdaa8aabeaaaaa@380E@
k
2
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaam4Aa8aadaWgaaWcbaWdbiaaikdaa8aabeaaaaa@380F@
k
1
=
1
ϕ
p
r
o
j
3
+
2
3
φ
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4AamaaBa
aabaGaaGymaaqabaGaeyypa0ZaaSaaaeaacaaIXaaabaWaaeWaaeaa
daWcaaqaaiabew9aMnaaBaaabaGaamiCaiaadkhacaWGVbGaamOAaa
qabaaabaGaaG4maaaacqGHRaWkdaWcaaqaaiaaikdaaeaacaaIZaWa
aOaaaeaacqaHgpGAaeqaaaaaaiaawIcacaGLPaaaaaaaaa@45D7@
k
2
=
10
1.8148
(
−
log
10
(
φ
)
)
0.5743
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4AamaaBa
aabaGaaGOmaaqabaGaeyypa0JaaGymaiaaicdadaahaaqabeaacaaI
XaGaaiOlaiaaiIdacaaIXaGaaGinaiaaiIdacaGGOaGaeyOeI0Iaci
iBaiaac+gacaGGNbWaaSbaaeaacaaIXaGaaGimaaqabaGaaiikaiab
eA8aQjaacMcacaGGPaWaaWbaaeqabaGaaGimaiaac6cacaaI1aGaaG
4naiaaisdacaaIZaaaaaaaaaa@4D13@
Where
ϕ
p
r
o
j
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqy1dy2aaS
baaeaacaWGWbGaamOCaiaad+gacaWGQbaabeaaaaa@3BAC@
A
R
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyqamaaBa
aaleaacaWGsbaabeaaaaa@37BD@
α
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqySdegaaa@3793@
ϕ
p
r
o
j
=
4
π
A
R
sin
2
α
+
cos
2
α
3
A
R
2
1
3
A
R
=
1
A
R
sin
2
α
+
cos
2
α
A
R
1
3
A
R
≠
1
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqy1dy2aaS
baaSqaaiaadchacaWGYbGaam4BaiaadQgaaeqaaOGaeyypa0Zaaiqa
aqaabeqaamaalaaabaWaaOaaaeaadaWcaaqaaiaaisdaaeaacqaHap
aCaaGaamyqamaaBaaaleaacaWGsbaabeaakmaakaaabaWaaeWaaeaa
ciGGZbGaaiyAaiaac6gadaahaaWcbeqaaiaaikdaaaGccqaHXoqyai
aawIcacaGLPaaaaSqabaGccqGHRaWkdaGcaaqaamaabmaabaGaci4y
aiaac+gacaGGZbWaaWbaaSqabeaacaaIYaaaaOGaeqySdegacaGLOa
GaayzkaaaaleqaaaqabaaakeaadaqadaqaamaalaaabaGaaG4maiaa
dgeadaWgaaWcbaGaamOuaaqabaaakeaacaaIYaaaaaGaayjkaiaawM
caamaaCaaaleqabaWaaSGaaeaacaaIXaaabaGaaG4maaaaaaaaaOGa
aCzcaiaaxMaacaaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaadgeadaWgaaWcbaGaamOu
aaqabaGccqGH9aqpcaaIXaaabaWaaSaaaeaadaGcaaqaaiaadgeada
WgaaWcbaGaamOuaaqabaGcdaGcaaqaamaabmaabaGaci4CaiaacMga
caGGUbWaaWbaaSqabeaacaaIYaaaaOGaeqySdegacaGLOaGaayzkaa
aaleqaaOGaey4kaSYaaOaaaeaadaqadaqaaiGacogacaGGVbGaai4C
amaaCaaaleqabaGaaGOmaaaakiabeg7aHbGaayjkaiaawMcaaaWcbe
aaaeqaaaGcbaWaaeWaaeaacaWGbbWaaSbaaSqaaiaadkfaaeqaaaGc
caGLOaGaayzkaaWaaWbaaSqabeaadaWccaqaaiaaigdaaeaacaaIZa
aaaaaaaaGccaWLjaGaaCzcaiaaykW7caaMc8UaaGPaVlaaykW7caaM
c8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaamyqamaaBa
aaleaacaWGsbaabeaakiabgcMi5kaaigdaaaGaay5Eaaaaaa@9A99@
Since this model only takes the
aspect ratio as an input, the sphericity (
φ
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOXdOgaaa@37B1@
φ
=
1.5
A
R
2
3
A
R
+
0.5
A
R
=
1
A
R
2
3
1
+
2
A
R
1.61
3
A
R
≠
1
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOXdOMaey
ypa0ZaaiqaaqaabeqaamaalaaabaWaaeWaaeaacaaIXaGaaiOlaiaa
iwdacaWGbbWaaSbaaSqaaiaadkfaaeqaaaGccaGLOaGaayzkaaWaaW
baaSqabeaadaWccaqaaiaaikdaaeaacaaIZaaaaaaaaOqaamaabmaa
baGaamyqamaaBaaaleaacaWGsbaabeaakiabgUcaRiaaicdacaGGUa
GaaGynaaGaayjkaiaawMcaamaaCaaaleqabaaaaaaakiaaxMaacaWL
jaGaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaayk
W7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPa
VlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8
UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7
caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7caWGbbWaaSbaaSqaaiaadkfaaeqaaOGaeyypa0JaaG
ymaaqaamaalaaabaWaaeWaaeaacaWGbbWaaSbaaSqaaiaadkfaaeqa
aaGccaGLOaGaayzkaaWaaWbaaSqabeaadaWccaqaaiaaikdaaeaaca
aIZaaaaaaaaOqaamaabmaabaWaaSaaaeaadaqadaqaaiaaigdacqGH
RaWkcaaIYaGaamyqamaaBaaaleaacaWGsbaabeaakmaaCaaaleqaba
GaaGymaiaac6cacaaI2aGaaGymaaaaaOGaayjkaiaawMcaaaqaaiaa
iodaaaaacaGLOaGaayzkaaWaaWbaaSqabeaaaaaaaOGaaCzcaiaayk
W7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPa
VlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8
UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7
caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7ca
WGbbWaaSbaaSqaaiaadkfaaeqaaOGaeyiyIKRaaGymaaaacaGL7baa
aaa@FAF1@
The Holzer-Sommerfeld correlation
is given by:
C
d
n
s
=
8
Re
i
1
φ
⊥
+
16
Re
i
1
φ
+
3
Re
i
1
φ
3
4
+
0.42
0.4
−
log
10
φ
0.2
1
φ
⊥
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaam4qa8aadaWgaaWcbaWdbiaadsgaa8aabeaakmaaCaaaleqabaWd
biaad6gacaWGZbaaaOGaeyypa0JaaiiOamaalaaapaqaa8qacaaI4a
aapaqaa8qacaqGsbGaaeyza8aadaqhaaWcbaWdbiaadMgaa8aabaaa
aaaak8qadaWcaaWdaeaapeGaaGymaaWdaeaapeWaaOaaa8aabaWdbi
abeA8aQnaaBaaaleaaaeqaaOWdamaaCaaaleqabaWdbiabgwQiEbaa
aeqaaaaakiabgUcaRmaalaaapaqaa8qacaaIXaGaaGOnaaWdaeaape
GaaeOuaiaabwgapaWaa0baaSqaa8qacaWGPbaapaqaaaaaaaGcpeWa
aSaaa8aabaWdbiaaigdaa8aabaWdbmaakaaapaqaa8qacqaHgpGAda
WgaaWcbaaabeaaaeqaaaaakiabgUcaRmaalaaapaqaa8qacaaIZaaa
paqaa8qadaGcaaWdaeaapeGaaeOuaiaabwgapaWaa0baaSqaa8qaca
WGPbaapaqaaaaaa8qabeaaaaGcdaWcaaWdaeaapeGaaGymaaWdaeaa
peGaeqOXdO2damaaDaaaleaaaeaapeWaaSGaa8aabaWdbiaaiodaa8
aabaWdbiaaisdaaaaaaaaakiabgUcaRiaacckacaaIWaGaaiOlaiaa
isdacaaIYaWaaWbaaSqabeaacaaIWaGaaiOlaiaaisdadaqadaWdae
aapeGaeyOeI0IaciiBaiaac+gacaGGNbWdamaaBaaameaapeGaaGym
aiaaicdaa8aabeaal8qacqaHgpGApaWaaSbaaWqaaaqabaaal8qaca
GLOaGaayzkaaWdamaaCaaameqabaWdbiaaicdacaGGUaGaaGOmaaaa
aaGcdaWcaaWdaeaapeGaaGymaaWdaeaapeGaeqOXdO2aaSbaaSqaaa
qabaGcpaWaaWbaaSqabeaapeGaeyyPI4faaaaaaaa@7114@
Where sphericity is calculated from the aspect ratio using the correlation:
φ =
1.5
A
R
2
3
A
R
+ 0.5
A
R
= 1
A
R
2
3
1 + 2
A
R
1.61
3
0.62111801242236
A
R
≠ 1
MathType@MTEF@5@5@+=
feaahGart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOXdOMaey
ypa0ZaaiqaaqaabeqaamaalaaabaWaaeWaaeaacaaIXaGaaiOlaiaa
iwdacaWGbbWaaSbaaSqaaiaadkfaaeqaaaGccaGLOaGaayzkaaWaaW
baaSqabeaadaWccaqaaiaaikdaaeaacaaIZaaaaaaaaOqaamaabmaa
baGaamyqamaaBaaaleaacaWGsbaabeaakiabgUcaRiaaicdacaGGUa
GaaGynaaGaayjkaiaawMcaamaaCaaaleqabaaaaaaakiaaxMaacaWL
jaGaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaayk
W7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPa
VlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8
UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7
caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa
dgeadaWgaaWcbaGaamOuaaqabaGccqGH9aqpcaaIXaaabaWaaSaaae
aadaqadaqaaiaadgeadaWgaaWcbaGaamOuaaqabaaakiaawIcacaGL
PaaadaahaaWcbeqaamaaliaabaGaaGOmaaqaaiaaiodaaaaaaaGcba
WaaeWaaeaadaWcaaqaamaabmaabaGaaGymaiabgUcaRiaaikdacaWG
bbWaaSbaaSqaaiaadkfaaeqaaOWaaWbaaSqabeaacaaIXaGaaiOlai
aaiAdacaaIXaaaaaGccaGLOaGaayzkaaaabaGaaG4maaaaaiaawIca
caGLPaaadaahaaWcbeqaaiaaicdacaGGUaGaaGOnaiaaikdacaaIXa
GaaGymaiaaigdacaaI4aGaaGimaiaaigdacaaIYaGaaGinaiaaikda
caaIYaGaaG4maiaaiAdaaaaaaOGaaCzcaiaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa
ykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaG
PaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaM
c8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caWGbbWaaSbaaSqaai
aadkfaaeqaaOGaeyiyIKRaaGymaaaacaGL7baaaaa@1C4E@
φ
⊥
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaeqOXdO2damaaCaaaleqabaWdbiabgwQiEbaaaaa@39C3@
φ
⊥
=
π
3
A
R
2
2
3
4
A
R
sin
2
α
+
π
cos
2
α
A
R
=
1
A
R
2
3
A
R
sin
2
α
+
cos
2
α
A
R
≠
1
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaaeaaaaaaaaa8
qacqaHgpGAdaWgaaWcbaaabeaak8aadaahaaWcbeqaa8qacqGHLkIx
aaGcpaGaeyypa0ZaaiqaaqaabeqaamaalaaabaGaeqiWda3aaeWaae
aadaWcaaqaaiaaiodacaWGbbWaaSbaaSqaaiaadkfaaeqaaaGcbaGa
aGOmaaaaaiaawIcacaGLPaaadaahaaWcbeqaamaaliaabaGaaGOmaa
qaaiaaiodaaaaaaaGcbaWaaeWaaeaacaaI0aGaamyqamaaBaaaleaa
caWGsbaabeaakmaakaaabaWaaeWaaeaaciGGZbGaaiyAaiaac6gada
ahaaWcbeqaaiaaikdaaaGccqaHXoqyaiaawIcacaGLPaaaaSqabaGc
cqGHRaWkcqaHapaCdaGcaaqaamaabmaabaGaci4yaiaac+gacaGGZb
WaaWbaaSqabeaacaaIYaaaaOGaeqySdegacaGLOaGaayzkaaaaleqa
aaGccaGLOaGaayzkaaWaaWbaaSqabeaaaaaaaOGaaCzcaiaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa
ykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caWGbbWaaS
baaSqaaiaadkfaaeqaaOGaeyypa0JaaGymaaqaamaalaaabaGaamyq
amaaBaaaleaacaWGsbaabeaakmaaCaaaleqabaWaaSGaaeaacaaIYa
aabaGaaG4maaaaaaaakeaadaqadaqaaiaadgeadaWgaaWcbaGaamOu
aaqabaGcdaGcaaqaamaabmaabaGaci4CaiaacMgacaGGUbWaaWbaaS
qabeaacaaIYaaaaOGaeqySdegacaGLOaGaayzkaaaaleqaaOGaey4k
aSYaaOaaaeaadaqadaqaaiGacogacaGGVbGaai4CamaaCaaaleqaba
GaaGOmaaaakiabeg7aHbGaayjkaiaawMcaaaWcbeaaaOGaayjkaiaa
wMcaamaaCaaaleqabaaaaaaakiaaxMaacaWLjaGaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa
ykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaadgeadaWgaaWcba
GaamOuaaqabaGccqGHGjsUcaaIXaaaaiaawUhaaaaa@AB46@
Lift Models
Generally, the lift force acts in a direction normal to the relative motion of the
fluid and particle. The two components of the lift force considered are Saffman
force and Magnus force. The Saffman lift force is due to the pressure gradient on a
non-rotating particle in the presence of a non-uniform shear velocity field while
the Magnus lift force is due to the particle rotation in a uniform flow. Unlike
spherical particles, the behavior of non-spherical particles in turbulent flows is
much more complicated and the lift force acting on them can no longer be neglected.
As the particle’s principal axis becomes inclined with the flow direction, the
effect of lift force on the particle motion becomes significant.
The lift force on a particle is given by:
f
i
L
=
β
l s
L
(
v
s l i p
×
ω
f
) +
β
l m
L
(
ω
s l i p
×
v
s l i p
) +
β
ln
L
(
e
^
L n
)
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOzamaaDa
aaleaacaWGPbaabaGaamitaaaakiabg2da9iabek7aInaaDaaaleaa
caWGSbGaam4CaaqaaiaadYeaaaGccaGGOaGaamODamaaBaaaleaaca
WGZbGaamiBaiaadMgacaWGWbaabeaakiabgEna0kabeM8a3naaBaaa
leaacaWGMbaabeaakiaacMcacqGHRaWkcqaHYoGydaqhaaWcbaGaam
iBaiaad2gaaeaacaWGmbaaaOGaaiikaiabeM8a3naaBaaaleaacaWG
ZbGaamiBaiaadMgacaWGWbaabeaakiabgEna0kaadAhadaWgaaWcba
Gaam4CaiaadYgacaWGPbGaamiCaaqabaGccaGGPaGaey4kaSIaeqOS
di2aa0baaSqaaiGacYgacaGGUbaabaGaamitaaaakiaacIcaqaaaaa
aaaaWdbiqadwgapaGbaKaadaWgaaWcbaWdbiaadYeapaGaamOBaaqa
baGccaGGPaaaaa@677B@
Where,
β
l
s
L
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOSdi2aa0
baaSqaaiaadYgacaWGZbaabaGaamitaaaaaaa@3A7B@
β
l
m
L
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOSdi2aa0
baaSqaaiaadYgacaWGTbaabaGaamitaaaaaaa@3A75@
β
ln
L
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOSdi2aa0
baaSqaaiGacYgacaGGUbaabaGaamitaaaaaaa@3A76@
ω
f
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqyYdC3aaS
baaSqaaiaadAgaaeqaaaaa@38D7@
∇ ×
v
f
→
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaey4bIeTaey
41aq7aa8HaaeaacaWG2bWaaSbaaSqaaiaadAgaaeqaaaGccaGLxdca
aaa@3D61@
ω
s
l
i
p
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqyYdC3aaS
baaSqaaiaadohacaWGSbGaamyAaiaadchaaeqaaaaa@3BB8@
ω
s l i p
=
1
2
ω
f
−
ω
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaGGadiab=L8a3n
aaBaaaleaacaWGZbGaamiBaiaadMgacaWGWbaabeaakabaaaaaaaaa
peGaeyypa0ZaaSaaa8aabaWdbiaaigdaa8aabaWdbiaaikdaaaWdai
ab=L8a3naaBaaaleaacaWGMbaabeaak8qacqGHsislpaGae8xYdC3a
aSbaaSqaaiaadchaaeqaaaaa@4598@
ω
p
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqyYdC3aaS
baaSqaaiaadchaaeqaaaaa@38E1@
∇ ×
v
p
→
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaey4bIeTaey
41aq7aa8HaaeaacaWG2bWaaSbaaSqaaiaadchaaeqaaaGccaGLxdca
aaa@3D6B@
There are three lift models available in
AcuSolve :
Saffman-MagnusThis model is for spherical particles and hence the
orientation is neglected whereas the last two models take the particle
orientation into account while calculating the lift forces.
The
correlation for the Saffman force is given by:
SLC is Saffman constant with a default value of
1.615. This value can be modified by you while specifying the model
inputs.
C
l
s
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaam4qa8aadaWgaaWcbaWdbiaadYgacaWGZbaapaqabaaaaa@3914@
The correlation for the Magnus force is given
by:
MLC is Magnus constant with a default value of 0.125. This value can be modified by you while
specifying the model inputs.
C
l
m
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaam4qa8aadaWgaaWcbaWdbiaadYgacaWGTbaapaqabaaaaa@390E@
is given by the
expression:
For the Saffman Magnus model,
β
ln
L
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaiabek7aInaaDa
aaleaaciGGSbGaaiOBaaqaaiaadYeaaaaaaa@3A6C@
Saffman-Magnus non-spherical liftThe non-spherical version of the
Saffman-Magnus lift model is similar to the spherical lift model except
the non-spherical lift coefficient
(
β
ln
L
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaiabek7aInaaDa
aaleaaciGGSbGaaiOBaaqaaiaadYeaaaaaaa@3A6C@
Non-spherical liftWhen the non-spherical lift model is selected, the
Saffman and Magnus lift coefficients are set to 0 and the non-spherical
lift coefficient is assumed to be proportional to the drag coefficient
and the correlation is given by:
β
ln
L
=
0.125
C
D
(
sin
2
α
⋅
cos
α
)
π
d
p
2
v
s
l
i
p
2
x
′
⋅
v
s
l
i
p
x
′
×
v
s
l
i
p
×
v
s
l
i
p
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaeqOSdi2aa0baaSqaaiGacYgacaGGUbaabaGaamitaaaakiabg2da
9iaacckapaWaaSaaaeaapeGaaGimaiaac6cacaaIXaGaaGOmaiaaiw
dacaWGdbWaaSbaaSqaaiaadseaaeqaaOGaaiikaiGacohacaGGPbGa
aiOBa8aadaahaaWcbeqaa8qacaaIYaaaaOGaeqySdeMaeyyXICTaci
4yaiaac+gacaGGZbGaeqySdeMaaiykaiabec8aWjaadsgapaWaa0ba
aSqaa8qacaWGWbaapaqaa8qacaaIYaaaaOWaaqWaa8aabaGaaCODam
aaBaaaleaacaWGZbGaamiBaiaadMgacaWGWbaabeaaaOWdbiaawEa7
caGLiWoapaWaaWbaaSqabeaapeGaaGOmaaaaaOWdaeaapeWaaqWaa8
aabaWdbiqadIhagaqbaiabgwSix=aacaWH2bWaaSbaaSqaaiaadoha
caWGSbGaamyAaiaadchaaeqaaaGcpeGaay5bSlaawIa7amaaemaaba
WaaeWaa8aabaWdbiqadIhagaqbaiabgEna0+aacaWH2bWaaSbaaSqa
aiaadohacaWGSbGaamyAaiaadchaaeqaaaGcpeGaayjkaiaawMcaai
abgEna0+aacaWH2bWaaSbaaSqaaiaadohacaWGSbGaamyAaiaadcha
aeqaaaGcpeGaay5bSlaawIa7aaaaaaa@7E29@
Here the drag coefficient is
obtained from the drag force calculation and
α
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqySdegaaa@3793@
e
^
L
o
=
x
′
i
⋅
v
s
l
i
p
x
′
×
v
s
l
i
p
×
v
s
l
i
p
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gabmyza8aagaqcamaaBaaaleaapeGaamita8aadaWgaaadbaWdbiaa
d+gaa8aabeaaaSqabaGcpeGaeyypa0JaaiiOamaabmaabaGabmiEay
aafaWaaSbaaSqaaiaadMgaaeqaaOGaeyyXICTaaCODamaaBaaaleaa
caWGZbGaamiBaiaadMgacaWGWbaabeaaaOGaayjkaiaawMcaamaabm
aabaWaaeWaaeaaceWG4bGbauaacqGHxdaTcaWH2bWaaSbaaSqaaiaa
dohacaWGSbGaamyAaiaadchaaeqaaaGccaGLOaGaayzkaaGaey41aq
RaaCODamaaBaaaleaacaWGZbGaamiBaiaadMgacaWGWbaabeaaaOGa
ayjkaiaawMcaaaaa@5908@
where,
x
′
i
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GabmiEayaafaWaaSbaaSqaaiaadMgaaeqaaaaa@382B@
v
s l i p
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaaCODamaaBaaaleaacaWGZbGaamiBaiaadMgacaWGWbaabeaaaaa@3AFF@
Torque Models
By using the torque models, the rotational drag force on the rotating particles due
to the inertia of fluid can be considered. When AcuSolve
sends the force information to EDEM , this torque is
added to the rotational motion equation in EDEM . The
torque on a particle is given by,
T
i
=
β
r
o
t
T
(
0.5
ω
f
−
ω
p
)
+
β
p
i
t
c
h
T
x
′
i
×
f
i
d
+
f
i
l
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamivamaaBa
aaleaacaWGPbaabeaakiabg2da9iabek7aInaaDaaaleaacaWGYbGa
am4BaiaadshaaeaacaWGubaaaOGaaiikaiaaicdacaGGUaGaaGynai
abeM8a3naaBaaaleaacaWGMbaabeaakiabgkHiTiabeM8a3naaBaaa
leaacaWGWbaabeaakiaacMcacqGHRaWkcqaHYoGydaqhaaWcbaGaam
iCaiaadMgacaWG0bGaam4yaiaadIgaaeaacaWGubaaaOWaaeWaaeaa
ceWG4bGbauaadaWgaaWcbaGaamyAaaqabaGccqGHxdaTdaqadaqaai
aadAgadaqhaaWcbaGaamyAaaqaaiaadsgaaaGccqGHRaWkcaWGMbWa
a0baaSqaaiaadMgaaeaacaWGSbaaaaGccaGLOaGaayzkaaaacaGLOa
Gaayzkaaaaaa@5F58@
The three types of torque models available in
AcuSolve
are pitching torque, rotational torque and a combination of both.
Pitching torqueWhen the center of pressure of the force acting on a
non-spherical particle does not coincide with the center of mass, it
results in a hydrodynamic pitching torque, also known as offset torque,
that acts around the axis perpendicular to the plane of relative fluid
velocity and particle orientation vector. The pitching torque can change
the angle of incidence of the particle.
The expression used for
calculating the pitching torque coefficient is given by:
β
p
i
t
c
h
T
=
0.25
δ
A
R
1
−
(
sin
α
)
3
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOSdi2aa0
baaSqaaiaadchacaWGPbGaamiDaiaadogacaWGObaabaGaamivaaaa
kiabg2da9iaaicdacaGGUaGaaGOmaiaaiwdacqaH0oazdaWgaaWcba
GaamyqaiaadkfaaeqaaOWaaeWaaeaacaaIXaGaeyOeI0IaaiikaiGa
cohacaGGPbGaaiOBaiabeg7aHjaacMcadaahaaWcbeqaaiaaiodaaa
aakiaawIcacaGLPaaaaaa@4EAF@
δ
A R
=
0.5
d
p
A R
2
3
A R > 1
0.5
d
p
A R
− 1
3
A R ≤ 1
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiTdq2aaS
baaSqaaiaadgeacaWGsbaabeaakiabg2da9maaceaaeaqabeaacaaI
WaGaaiOlaiaaiwdacaWGKbWaaSbaaSqaaiaadchaaeqaaOWaaeWaae
aacaWGbbGaamOuaaGaayjkaiaawMcaamaaCaaaleqabaWaaSGaaeaa
caaIYaaabaGaaG4maaaacaWLjaaaaOGaaCzcaiaaywW7caWGbbGaam
Ouaiabg6da+iaaigdaaeaacaaIWaGaaiOlaiaaiwdacaWGKbWaaSba
aSqaaiaadchaaeqaaOWaaeWaaeaacaWGbbGaamOuaaGaayjkaiaawM
caamaaCaaaleqabaWaaSGaaeaacqGHsislcaaIXaaabaGaaG4maaaa
aaGccaWLjaGaaCzcaiaaywW7caWGbbGaamOuaiabgsMiJkaaigdaaa
Gaay5Eaaaaaa@5BDD@
Where,
A
R
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaiaadgeacaWGsb
aaaa@3786@
α
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaeqySdegaaa@37A8@
Rotational torqueA particle experiences rotational torque, also known as
rolling friction torque, when there is a difference between the local
fluid rotation and the angular velocity of the particle. The rotational
torque is applied at the center of mass of the particle and the
rotational torque coefficient is given by the expression:
Where,
Re
r
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaaeOuaiaabwgapaWaaSbaaSqaa8qacaWGYbaapaqabaaaaa@3917@
Re
r
=
ε
f
ρ
f
d
p
2
0.5
ω
f
−
ω
p
μ
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaaeOuaiaabwgapaWaaSbaaSqaa8qacaWGYbaapaqabaGcpeGaeyyp
a0ZaaSaaa8aabaWdbiabew7aLnaaBaaaleaacaWGMbaabeaakiabeg
8aY9aadaWgaaWcbaWdbiaadAgaa8aabeaak8qacaWGKbWdamaaDaaa
leaapeGaamiCaaWdaeaapeGaaGOmaaaakmaaemaapaqaa8qacaaIWa
GaaiOlaiaaiwdaiiWacqWFjpWDdaWgaaWcbaGaamOzaaqabaGccqGH
sislcqWFjpWDdaWgaaWcbaGaamiCaaqabaaakiaawEa7caGLiWoaa8
aabaWdbiabeY7aTnaaBaaaleaacaWGMbaabeaaaaaaaa@528A@
Pitching rotational torqueWhen the pitching rotational torque model is
selected, both pitching torque and rotational torque are applied on the
particle.
Heat Transfer Governing Equations
When heat transfer is active, in addition to the momentum equation, the energy
conservation equations for the fluid and the particle are solved simultaneously to
obtain the temperature of each phase. The governing equations for obtaining the
temperatures of the particles and fluid are described below:
Where
Q
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaamyua8aadaWgaaWcbaWdbiaadchaa8aabeaaaaa@382E@
A
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaamyqa8aadaWgaaWcbaWdbiaadchaa8aabeaaaaa@381E@
T
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaamiva8aadaWgaaWcbaWdbiaadchaa8aabeaaaaa@3831@
T
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaamiva8aadaWgaaWcbaWdbiaadAgaa8aabeaaaaa@3827@
h
f
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaamiAa8aadaWgaaWcbaWdbiaadAgacaWGWbaapaqabaaaaa@3930@
Nu
p
=
h
f
p
d
p
k
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaaeOtaiaabwhapaWaaSbaaSqaa8qacaWGWbaapaqabaGcpeGaeyyp
a0ZaaSaaa8aabaWdbiaadIgapaWaaSbaaSqaa8qacaWGMbGaamiCaa
WdaeqaaOWdbiaadsgapaWaaSbaaSqaa8qacaWGWbaapaqabaaakeaa
peGaam4Aa8aadaWgaaWcbaWdbiaadAgaa8aabeaaaaaaaa@4238@
Nu
p
=
2
+
0.6
ε
f
3.5
Re
i
0.5
Pr
0.333333
Re
i
<
200
2
+
0.5
ε
f
3.5
Re
i
0.5
Pr
0.333333
+
0.02
ε
f
3.5
Re
i
0.8
Pr
0.333333
200
≤
Re
i
<
1500
2
+
0.000045
ε
f
3.5
Re
i
1.8
Re
≥
1500
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaaeOtaiaabwhapaWaaSbaaSqaa8qacaWGWbaapaqabaGcpeGaeyyp
a0ZaaiqaaqaabeqaaiaaikdacqGHRaWkcaaIWaGaaiOlaiaaiAdacq
aH1oqzdaqhaaWcbaGaamOzaaqaaiaaiodacaGGUaGaaGynaaaakiGa
ckfacaGGLbWaa0baaSqaaiaadMgaaeaacaaIWaGaaiOlaiaaiwdaaa
GcciGGqbGaaiOCamaaCaaaleqabaGaaGimaiaac6cacaaIZaGaaG4m
aiaaiodacaaIZaGaaG4maiaaiodaaaGccaaMc8UaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa
ykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaG
PaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaM
c8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaayk
W7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPa
VlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8
UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7
caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa
ykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Uaci
OuaiaacwgadaWgaaWcbaGaamyAaaqabaGccqGH8aapcaaIYaGaaGim
aiaaicdaaeaacaaIYaGaey4kaSIaaGimaiaac6cacaaI1aGaeqyTdu
2aa0baaSqaaiaadAgaaeaacaaIZaGaaiOlaiaaiwdaaaGcciGGsbGa
aiyzamaaDaaaleaacaWGPbaabaGaaGimaiaac6cacaaI1aaaaOGaci
iuaiaackhadaahaaWcbeqaaiaaicdacaGGUaGaaG4maiaaiodacaaI
ZaGaaG4maiaaiodacaaIZaaaaOGaey4kaSIaaGimaiaac6cacaaIWa
GaaGOmaiabew7aLnaaDaaaleaacaWGMbaabaGaaG4maiaac6cacaaI
1aaaaOGaciOuaiaacwgadaqhaaWcbaGaamyAaaqaaiaaicdacaGGUa
GaaGioaaaakiGaccfacaGGYbWaaWbaaSqabeaacaaIWaGaaiOlaiaa
iodacaaIZaGaaG4maiaaiodacaaIZaGaaG4maaaakiaaykW7caaMc8
UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7
caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa
ykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaG
OmaiaaicdacaaIWaGaeyizImQaciOuaiaacwgadaWgaaWcbaGaamyA
aaqabaGccqGH8aapcaaIXaGaaGynaiaaicdacaaIWaaabaGaaGOmai
abgUcaRiaaicdacaGGUaGaaGimaiaaicdacaaIWaGaaGimaiaaisda
caaI1aGaeqyTdu2aa0baaSqaaiaadAgaaeaacaaIZaGaaiOlaiaaiw
daaaGcciGGsbGaaiyzamaaDaaaleaacaWGPbaabaGaaGymaiaac6ca
caaI4aaaaOGaaCzcaiaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaG
PaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaM
c8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaayk
W7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPa
VlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8
UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7
caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl
aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Ua
aGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7ca
aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa
ykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaG
PaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaM
c8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaciOuaiaacw
gacqGHLjYScaaIXaGaaGynaiaaicdacaaIWaGaaCzcaaaacaGL7baa aaa@29BE@
Where
Pr
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
Gaaeiuaiaabkhaaaa@37D1@
Pr
=
μ
f
C
p
f
k
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
GaaeiuaiaabkhacqGH9aqpdaWcaaWdaeaapeGaeqiVd02damaaBaaa
leaapeGaamOzaaWdaeqaaOWdbiaadoeapaWaaSbaaSqaa8qacaWGWb
GaamOzaaWdaeqaaaGcbaWdbiaadUgapaWaaSbaaSqaa8qacaWGMbaa
paqabaaaaaaa@416C@
The rate of change of the particle’s temperature over time is given
by,
m
p
c
p
d T
d t
=
∑
Q
h e a t
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyBamaaBa
aaleaacaWGWbaabeaakiaadogadaWgaaWcbaGaamiCaaqabaGcdaWc
aaqaaiaadsgacaWGubaabaGaamizaiaadshaaaGaeyypa0ZaaabCae
aacaWGrbWaaSbaaSqaaiaadIgacaWGLbGaamyyaiaadshaaeqaaaqa
aaqaaaqdcqGHris5aaaa@45CD@
Where
Q
h
e
a
t
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyuamaaBa
aaleaacaWGObGaamyzaiaadggacaWG0baabeaaaaa@3AAC@
AcuSolve based
on the correlation described above and shared through the coupling interface once
per each AcuSolve time step. The conductive heat
transfer is due to particle-particle and particle-geometry contacts and is
calculated based on the relative temperatures and the particle overlap. The
conductive heat flux between two particles
p
1
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamiCaiaaig
daaaa@37A4@
p
2
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamiCaiaaik
daaaa@37A5@
Q
p 1 p 2
=
4
k
p 1
k
p 2
k
p 1
+
k
p 2
3
F
N
r
*
4
E
*
1 / 3
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyuamaaBa
aaleaacaWGWbGaaGymaiaadchacaaIYaaabeaakiabg2da9maalaaa
baGaaGinaiaadUgadaWgaaWcbaGaamiCaiaaigdaaeqaaOGaam4Aam
aaBaaaleaacaWGWbGaaGOmaaqabaaakeaacaWGRbWaaSbaaSqaaiaa
dchacaaIXaaabeaakiabgUcaRiaadUgadaWgaaWcbaGaamiCaiaaik
daaeqaaaaakmaadmaabaWaaSaaaeaacaaIZaGaamOramaaBaaaleaa
caWGobaabeaakiaadkhadaahaaWcbeqaaiaacQcaaaaakeaacaaI0a
GaamyramaaCaaaleqabaGaaiOkaaaaaaaakiaawUfacaGLDbaadaah
aaWcbeqaaiaaigdacaGGVaGaaG4maaaaaaa@53A4@
Where
k
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4Aaaaa@36E4@
F
N
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOramaaBa
aaleaacaWGobaabeaaaaa@37BE@
r
*
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOCamaaCa
aaleqabaGaaiOkaaaaaaa@37C6@
E
*
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyramaaCa
aaleqabaGaaiOkaaaaaaa@3799@
Mass Transfer Model
The governing equations for the mass transfer in AcuSolve -EDEM coupling are described below:
∂ (
ε
f
ρ
f
)
∂ t
+ ∇ ⋅ (
ρ
f
ε
f
v
f
) =
m
•
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
WaaSaaa8aabaWdbiabgkGi2kaacIcacqaH1oqzpaWaaSbaaSqaa8qa
caWGMbaapaqabaGccqaHbpGCdaWgaaWcbaGaamOzaaqabaGccaGGPa
aabaWdbiabgkGi2kaadshaaaGaey4kaSIaey4bIeTaeyyXICTaaiik
a8aacqaHbpGCdaWgaaWcbaGaamOzaaqabaGcpeGaeqyTdu2damaaBa
aaleaapeGaamOzaaWdaeqaaGqabOWdbiaa=zhadaWgaaWcbaGaamOz
aaqabaGcpaGaaiyka8qacqGH9aqpdaWfGaqaaiaad2gaaSqabeaacq
GHIaYTaaaaaa@5355@
Additionally, a species transport equation is also solved for tracking the transport
of the vapor phase in the fluid domain.
∂
∂
t
ρ
f
ε
f
ψ
v
+
∇
.
v
f
ρ
f
ε
f
ψ
v
=
∇
.
D
v
∇
ψ
v
+
m
•
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
WaaSaaa8aabaWdbiabgkGi2cWdaeaapeGaeyOaIyRaamiDaaaadaqa
daWdaeaapeGaeqyWdi3aaSbaaSqaaiaadAgaaeqaaOGaeqyTdu2dam
aaBaaaleaapeGaamOzaaWdaeqaaOWdbiabeI8a5naaBaaaleaacaWG
2baabeaaaOGaayjkaiaawMcaaiabgUcaRiabgEGirlaac6cadaqada
WdaeaaieqacaWF2bWaaSbaaSqaaiaadAgaaeqaaOWdbiabeg8aY9aa
daWgaaWcbaWdbiaadAgaa8aabeaak8qacqaH1oqzpaWaaSbaaSqaa8
qacaWGMbaapaqabaGcpeGaeqiYdK3aaSbaaSqaaiaadAhaaeqaaaGc
caGLOaGaayzkaaGaeyypa0JaaeiOaiabgEGirlaac6cadaqadaWdae
aapeGaamiramaaBaaaleaacaWG2baabeaakiabgEGirlabeI8a5naa
BaaaleaacaWG2baabeaaaOGaayjkaiaawMcaaiabgUcaRmaaxacaba
GaamyBaaWcbeqaaiabgkci3caaaaa@64DC@
∂
∂ t
ρ
f
ε
f
C
p f
T
f
+ ∇ .
v
f
ρ
f
ε
f
C
p f
T
f
= ∇ .
ε
f
k
f
∇
T
f
+
Q
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVCI8FfYJH8YrFfeuY=Hhbbf9v8qqaqFr0xc9pk0xbb
a9q8WqFfeaY=biLkVcLq=JHqpepeea0=as0Fb9pgeaYRXxe9vr0=vr
0=vqpWqaaeaabiGaciaacaqabeaadaqaaqaaaOqaaabaaaaaaaaape
WaaSaaa8aabaWdbiabgkGi2cWdaeaapeGaeyOaIyRaamiDaaaadaqa
daWdaeaapeGaeqyWdi3aaSbaaSqaaiaadAgaaeqaaOGaeqyTdu2dam
aaBaaaleaapeGaamOzaaWdaeqaaOWdbiaadoeapaWaaSbaaSqaa8qa
caWGWbGaamOzaaWdaeqaaOWdbiaadsfapaWaaSbaaSqaa8qacaWGMb
aapaqabaaak8qacaGLOaGaayzkaaGaey4kaSIaey4bIeTaaiOlamaa
bmaapaqaaGqabiaa=zhadaWgaaWcbaGaamOzaaqabaGcpeGaeqyWdi
3damaaBaaaleaapeGaamOzaaWdaeqaaOWdbiabew7aL9aadaWgaaWc
baWdbiaadAgaa8aabeaak8qacaWGdbWdamaaBaaaleaapeGaamiCai
aadAgaa8aabeaak8qacaWGubWdamaaBaaaleaapeGaamOzaaWdaeqa
aaGcpeGaayjkaiaawMcaaiabg2da9iaabckacqGHhis0caGGUaWaae
Waa8aabaWdbiabew7aL9aadaWgaaWcbaWdbiaadAgaa8aabeaak8qa
caWGRbWdamaaBaaaleaapeGaamOzaaWdaeqaaOWdbiabgEGirlaads
fapaWaaSbaaSqaa8qacaWGMbaapaqabaaak8qacaGLOaGaayzkaaGa
ey4kaSIaamyua8aadaWgaaWcbaWdbiaadchaa8aabeaaaaa@6B7F@
For the mass transfer simulations, the heat source term on the right-hand side
consists of both the convective term and a latent heat term due to evaporation of
the liquid phase, that is, moisture content of particle. This is calculated as shown
below:
d
T
p
d t
=
f
2
N u
3 Pr
θ
1
τ
p
(
T
f
−
T
p
) +
L
V
C
p , l
m
•
m
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWaaSaaaeaaca
WGKbGaamivamaaBaaaleaacaWGWbaabeaaaOqaaiaadsgacaWG0baa
aiabg2da9iaadAgadaWgaaWcbaGaaGOmaaqabaGcdaWcaaqaaiaad6
eacaWG1baabaGaaG4maiGaccfacaGGYbaaamaabmaabaWaaSaaaeaa
cqaH4oqCdaWgaaWcbaGaaGymaaqabaaakeaacqaHepaDdaWgaaWcba
GaamiCaaqabaaaaaGccaGLOaGaayzkaaGaaiikaiaadsfadaWgaaWc
baGaamOzaaqabaGccqGHsislcaWGubWaaSbaaSqaaiaadchaaeqaaO
GaaiykaiabgUcaRmaabmaabaWaaSaaaeaacaWGmbWaaSbaaSqaaiaa
dAfaaeqaaaGcbaGaam4qamaaBaaaleaacaWGWbGaaiilaiaadYgaae
qaaaaaaOGaayjkaiaawMcaamaalaaabaWaaCbiaeaacaWGTbaaleqa
baGaeyOiGClaaaGcbaGaamyBaaaaaaa@5B4D@
Where the first term on the RHS represents the convective term and is scaled by an
augmentation factor due to the evaporation of liquid and the second term represents
the latent heat effects.
θ
1
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiUde3aaS
baaSqaaiaaigdaaeqaaaaa@3891@
m
•
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWaaCbiaeaaca
WGTbaaleqabaGaeyOiGClaaaaa@38B4@
m
•
=
d
m
d
t
=
−
S
h
3
S
c
f
m
τ
p
H
M
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWaaCbiaeaaca
WGTbaaleqabaGaeyOiGClaaOGaeyypa0ZaaSaaaeaacaWGKbGaamyB
aaqaaiaadsgacaWG0baaaiabg2da9iabgkHiTmaalaaabaGaam4uai
aadIgaaeaacaaIZaGaam4uaiaadogadaWgaaWcbaGaamOzaaqabaaa
aOWaaeWaaeaadaWcaaqaaiaad2gaaeaacqaHepaDdaWgaaWcbaGaam
iCaaqabaaaaaGccaGLOaGaayzkaaGaamisamaaBaaaleaacaWGnbaa
beaaaaa@4C3D@
Where,
S
h
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaiaadI
gaaaa@37B9@
S
h
=
2
+
0.6
ε
f
3.5
Re
i
0.5
S
c
f
0.333333
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaiaadI
gacqGH9aqpcaaIYaGaey4kaSIaaGimaiaac6cacaaI2aGaeqyTdu2a
a0baaSqaaiaadAgaaeaacaaIZaGaaiOlaiaaiwdaaaGcciGGsbGaai
yzamaaDaaaleaacaWGPbaabaGaaGimaiaac6cacaaI1aaaaOGaam4u
aiaadogadaqhaaWcbaGaamOzaaqaaiaaicdacaGGUaGaaG4maiaaio
dacaaIZaGaaG4maiaaiodacaaIZaaaaaaa@4F43@
S
c
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaiaado
gadaWgaaWcbaGaamOzaaqabaaaaa@38CB@
S
c
f
=
μ
f
ρ
f
D
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4uaiaado
gadaWgaaWcbaGaamOzaaqabaGccqGH9aqpdaWcaaqaaiabeY7aTnaa
BaaaleaacaWGMbaabeaaaOqaaiabeg8aYnaaBaaaleaacaWGMbaabe
aakiaadseadaWgaaWcbaGaamOzaaqabaaaaaaa@4183@
D
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamiramaaBa
aaleaacaWGMbaabeaaaaa@37D4@
H
M
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamisamaaBa
aaleaacaWGnbaabeaaaaa@37BF@
m
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyBaaaa@36E6@
Stokes flow time constant of the particle,
τ
p
=
ρ
l
d
p
2
18
μ
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiXdq3aaS
baaSqaaiaadchaaeqaaOGaeyypa0ZaaSaaaeaacqaHbpGCdaWgaaWc
baGaamiBaaqabaGccaWGKbWaa0baaSqaaiaadchaaeaacaaIYaaaaa
GcbaGaaGymaiaaiIdacqaH8oqBdaWgaaWcbaGaamOzaaqabaaaaaaa @43FC@
The evaporation potential
H
M
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWaaeWaaeaaca
WGibWaaSbaaSqaaiaad2eaaeqaaaGccaGLOaGaayzkaaaaaa@3952@
H
M
=
log
(
1
+
B
M
)
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamisamaaBa
aaleaacaWGnbaabeaakiabg2da9iGacYgacaGGVbGaai4zaiaacIca
caaIXaGaey4kaSIaamOqamaaBaaaleaacaWGnbaabeaakiaacMcaaa a@4064@
B
M
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOqamaaBa
aaleaacaWGnbaabeaaaaa@37B9@
B
M
=
ψ
s
,
e
q
−
ψ
f
1
−
ψ
s
,
e
q
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOqamaaBa
aaleaacaWGnbaabeaakiabg2da9maalaaabaGaeqiYdK3aaSbaaSqa
aiaadohacaGGSaGaamyzaiaadghaaeqaaOGaeyOeI0IaeqiYdK3aaS
baaSqaaiaadAgaaeqaaaGcbaGaaGymaiabgkHiTiabeI8a5naaBaaa
leaacaWGZbGaaiilaiaadwgacaWGXbaabeaaaaaaaa@496B@
ψ
s
,
e
q
=
χ
s
,
n
e
q
χ
s
,
n
e
q
+
(
1
−
χ
s
,
n
e
q
)
(
W
m
o
l
,
f
W
m
o
l
,
v
)
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiYdK3aaS
baaSqaaiaadohacaGGSaGaamyzaiaadghaaeqaaOGaeyypa0ZaaSaa
aeaacqaHhpWydaWgaaWcbaGaam4CaiaacYcacaWGUbGaamyzaiaadg
haaeqaaaGcbaWaaeWaaeaacqaHhpWydaWgaaWcbaGaam4CaiaacYca
caWGUbGaamyzaiaadghaaeqaaOGaey4kaSIaaiikaiaaigdacqGHsi
slcqaHhpWydaWgaaWcbaGaam4CaiaacYcacaWGUbGaamyzaiaadgha
aeqaaOGaaiykaiaacIcadaWcaaqaaiaadEfadaWgaaWcbaGaamyBai
aad+gacaWGSbGaaiilaiaadAgaaeqaaaGcbaGaam4vamaaBaaaleaa
caWGTbGaam4BaiaadYgacaGGSaGaamODaaqabaaaaOGaaiykaaGaay
jkaiaawMcaaaaaaaa@61BB@
χ
s
,
n
e
q
=
χ
s
,
e
q
−
2
L
K
d
p
β
e
v
a
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeq4Xdm2aaS
baaSqaaiaadohacaGGSaGaamOBaiaadwgacaWGXbaabeaakiabg2da
9iabeE8aJnaaBaaaleaacaWGZbGaaiilaiaadwgacaWGXbaabeaaki
abgkHiTmaabmaabaWaaSaaaeaacaaIYaGaamitamaaBaaaleaacaWG
lbaabeaaaOqaaiaadsgadaWgaaWcbaGaamiCaaqabaaaaaGccaGLOa
GaayzkaaGaeqOSdi2aaSbaaSqaaiaadwgacaWG2bGaamyyaiaadcha
aeqaaaaa@4F91@
β
e
v
a
p
=
−
3
Pr
τ
p
2
m
•
m
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqOSdi2aaS
baaSqaaiaadwgacaWG2bGaamyyaiaadchaaeqaaOGaeyypa0JaeyOe
I0YaaeWaaeaadaWcaaqaaiaaiodaciGGqbGaaiOCaiabes8a0naaBa
aaleaacaWGWbaabeaaaOqaaiaaikdaaaaacaGLOaGaayzkaaWaaeWa
aeaadaWcaaqaamaaxacabaGaamyBaaWcbeqaaiabgkci3caaaOqaai
aad2gaaaaacaGLOaGaayzkaaaaaa@4AA1@
L
K
=
μ
f
2
π
T
p
(
R
¯
W
m
o
l
,
l
)
S
c
f
p
f
,
l
o
c
a
l
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamitamaaBa
aaleaacaWGlbaabeaakiabg2da9maalaaabaGaeqiVd02aaSbaaSqa
aiaadAgaaeqaaOWaaOaaaeaacaaIYaGaeqiWdaNaamivamaaBaaale
aacaWGWbaabeaakiaacIcadaWcaaqaamaanaaabaGaamOuaaaaaeaa
caWGxbWaaSbaaSqaaiaad2gacaWGVbGaamiBaiaacYcacaWGSbaabe
aaaaGccaGGPaaaleqaaaGcbaGaam4uaiaadogadaWgaaWcbaGaamOz
aaqabaGccaWGWbWaaSbaaSqaaiaadAgacaGGSaGaamiBaiaad+gaca
WGJbGaamyyaiaadYgaaeqaaaaaaaa@5276@
χ
s
,
e
q
=
p
a
t
m
p
f
,
l
o
c
a
l
e
L
v
W
m
o
l
,
v
R
¯
1
T
b
,
v
−
1
T
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeq4Xdm2aaS
baaSqaaiaadohacaGGSaGaamyzaiaadghaaeqaaOGaeyypa0ZaaeWa
aeaadaWcaaqaaiaadchadaWgaaWcbaGaamyyaiaadshacaWGTbaabe
aaaOqaaiaadchadaWgaaWcbaGaamOzaiaacYcacaWGSbGaam4Baiaa
dogacaWGHbGaamiBaaqabaaaaaGccaGLOaGaayzkaaGaamyzamaaCa
aaleqabaWaaeWaaeaadaqadaqaamaalaaabaGaamitamaaBaaameaa
caWG2baabeaaliaadEfadaWgaaadbaGaamyBaiaad+gacaWGSbGaai
ilaiaadAhaaeqaaaWcbaWaa0aaaeaacaWGsbaaaaaaaiaawIcacaGL
PaaadaqadaqaamaalaaabaGaaGymaaqaaiaadsfadaWgaaadbaGaam
OyaiaacYcacaWG2baabeaaaaWccqGHsisldaWcaaqaaiaaigdaaeaa
caWGubWaaSbaaWqaaiaadchaaeqaaaaaaSGaayjkaiaawMcaaaGaay
jkaiaawMcaaaaaaaa@5FDE@
f
2
=
β
e v a p
(
e
β
e v a p
− 1 )
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOzamaaBa
aaleaacaaIYaaabeaakiabg2da9maalaaabaGaeqOSdi2aaSbaaSqa
aiaadwgacaWG2bGaamyyaiaadchaaeqaaaGcbaGaaiikaiaadwgada
ahaaWcbeqaaiabek7aInaaBaaameaacaWGLbGaamODaiaadggacaWG
WbaabeaaaaGccqGHsislcaaIXaGaaiykaaaaaaa@482E@
Where,
ψ
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiYdKhaaa@37C2@
χ
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeq4Xdmgaaa@37AB@
s
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4Caaaa@36EC@
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOzaaaa@36DF@
e
q
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyzaiaadg
haaaa@37D4@
n
e
q
MathType@MTEF@5@5@+=
feaahqart1ev3aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOBaiaadw
gacaWGXbaaaa@38C6@
W
m
o
l
,
f
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4vamaaBa
aaleaacaWGTbGaam4BaiaadYgacaGGSaGaamOzaaqabaaaaa@3B6E@
W
m o l , l
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaam4vamaaBa
aaleaacaWGTbGaam4BaiaadYgacaGGSaGaamiBaaqabaaaaa@3B74@
L
v
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWccaWGmbWaaS
baaWqaaiaadAhaaeqaaaaa@37F8@
T
b , v
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamivamaaBa
aaleaacaWGIbGaaiilaiaadAhaaeqaaaaa@398B@
T
p
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamivamaaBa
aaleaacaWGWbaabeaaaaa@37EE@
R
¯
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWaa0aaaeaaca
WGsbaaaaaa@36DC@
p
a t m
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamiCamaaBa
aaleaacaWGHbGaamiDaiaad2gaaeqaaaaa@39E6@
p
f , l o c a l
MathType@MTEF@5@5@+=
feaahqart1ev3aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr
4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq=Jc9
vqaqpepm0xbba9pwe9Q8fs0=yqaqpepae9pg0FirpepeKkFr0xfr=x
fr=xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamiCamaaBa
aaleaacaWGMbGaaiilaiaadYgacaWGVbGaam4yaiaadggacaWGSbaa
beaaaaa@3D54@