
/SLIPRING/SHELL
Block Format Keyword Define a 2D slipring for seatbelt elements defined with /MAT/LAW119 and /PROP/TYPE9.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /SLIPRING/SHELL/slipring_ID/unit_ID | |||||||||
| slipring_title | |||||||||
| El_Gr1 | El_Gr2 | Gr_Nod | Sens_ID | Fl_flag | Ed_factor | ||||
| fct_ID1 | fct_ID2 | Fric_d | Xscale1 | Yscale2 | Xscale2 | ||||
| fct_ID3 | fct_ID4 | Fric_s | Xscale3 | Yscale4 | Xscale4 | ||||
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| slipring_ID | Slipring identifier. (Integer, maximum 10 digits) |
|
| unit_ID | (Optional) Unit identifier. (Integer, maximum 10 digits) |
|
| slipring_title | Slipring title. (Character, maximum 100 characters) |
|
| El_Gr1 | ID of first group (or set) of
elements in slipring. 2
3 (Integer, maximum 10 digits) |
|
| El_Gr2 | ID of second group (or set) of
elements in slipring. 2
3
(Integer, maximum 10 digits) |
|
| Gr_Nod | Group of anchorage nodes. 4
(Integer, maximum 10 digits) |
|
| Sens_ID | Sensor identifier used for slipring locking.
(Integer) |
|
| Fl_flag | Sliding direction control flag.
(Integer) |
|
| Ed_factor | Exponential decay factor for
Coulomb friction. (Real) |
|
| fct_ID1 | Dynamic Coulomb friction
coefficient as a function of time
identifier. (Integer) |
|
| fct_ID2 | Dynamic Coulomb friction
coefficient as a function of normal force
identifier, (Integer) |
|
| Fric_d |
(Real) |
|
| Xscale1 | Abscissa scaling factor for
function fct_ID1. (Real) |
|
| Xscale2 | Abscissa scaling factor for
function fct_ID2. (Real) |
|
| Yscale2 | Ordinate scaling factor for
function fct_ID2. (Real) |
|
| fct_ID3 | Static Coulomb friction coefficient
as a function of time identifier. (Integer) |
|
| fct_ID4 | Static Coulomb friction coefficient
as a function of normal force
identifier. (Integer) |
|
| Fric_s |
(Real) |
|
| Xscale3 | Abscissa scaling factor for
function fct_ID3. (Real) |
|
| Yscale4 | Ordinate scaling factor for
function fct_ID4. (Real) |
|
| Xscale4 | Abscissa scaling factor for
function fct_ID4. (Real) |
Comments
- The /SLIPRING/SHELL option is an extension to seatbelt shell elements of the /SLIPRING/SPRING. It can be seen as sequence of /SLIPRING/SPRING. The parameters are almost the same; therefore, refer to /SLIPRING/SPRING for a detailed explanation concerning parameters, slipring updates during the run, locking and friction.
- The /SLIPRING/SHELL can only be connected to seatbelt shell elements, shells using a seatbelt material (/MAT/LAW119 (SH_SEATBELT)).
- The
/SLIPRING/SHELL is defined by the 2 groups of shell
elements initially connected to the slipring, El_Gr1,
El_Gr2 and a group of nodes Gr_Nod
used to define the position of the slipring. The common node between the
elements of El_Gr1 and El_Gr2 must be
at the same position as Gr_Nod.
Figure 1. 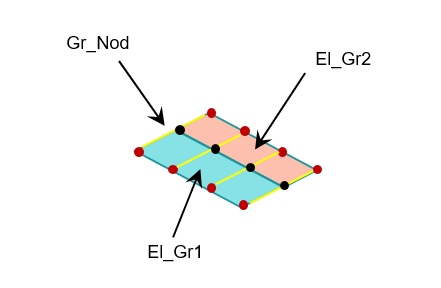
- The slipring must be represented by a line; therefore, the nodes of Gr_Nod must be aligned and can not be nodes of the seatbelt shell elements. All the nodes of Gr_Nod must belong to a single rigid body or boundary condition (all DOF fixed).
- At any time, the common nodes of the shell seatbelt elements are kinematically attached to the corresponding anchorage nodes. No other kinematic condition can be applied to theses nodes.
- Shell elements that are connected to the slipring are deactivated and are reactivated when they are outside of the slipring. The activation/deactivation of shell elements is progressive, and a scaling factor computed from the distance between the shell element and the slipring is applied on the stresses.
- 2D seatbelt uses /PROP/TYPE9 (SH_ORTH) with IP = 24 and Iskew > 0.