/SLIPRING/SPRING
Block Format Keyword Define 1D slipring for seatbelt elements defined with /MAT/LAW114 and /PROP/TYPE23.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /SLIPRING/SPRING/slipring_ID/unit_ID | |||||||||
| slipring_title | |||||||||
| El_ID1 | El_ID2 | node_ID1 | node_ID2 | sens_ID | Fl_flag | A | Ed_factor | ||
| fct_ID1 | fct_ID2 | Fric_d | Xscale1 | Yscale2 | Xscale2 | ||||
| fct_ID3 | fct_ID4 | Fric_s | Xscale3 | Yscale4 | Xscale4 | ||||
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| slipring_ID | Slipring identifier. (Integer, maximum 10 digits) |
|
| unit_ID | (Optional) Unit
identifier. (Integer, maximum 10 digits) |
|
| slipring_title | Slipring title title. (Character, maximum 100 characters) |
|
| El_ID1 | ID of first element in
slipring. (Integer, maximum 10 digits) |
|
| El_ID2 | ID of second element in
slipring. (Integer, maximum 10 digits) |
|
| node_ID1 | ID of anchorage node.
(Integer, maximum 10 digits) |
|
| node_ID2 | Optional ID of node for the
orientation of the slipring. (Integer, maximum 10 digits) |
|
| sens_ID | Sensor identifier used for slipring
locking.
(Integer) |
|
| Fl_flag | Sliding direction control flag
(Integer) |
|
| A | Coulomb friction scale
factor. (Real) |
|
| Ed_factor | Exponential decay factor for
Coulomb friction. (Real) |
|
| fct_ID1 | Function identifier defining
dynamic Coulomb friction coefficient as a function of
time. (Integer) |
|
| fct_ID2 | Function identifier defining
dynamic Coulomb friction coefficient as a function of normal
force. (Integer) |
|
| Fric_d | Dynamic Coulomb friction
coefficient. If fct_ID1 = 0: constant value (Default = 0). If fct_ID1 > 0: ordinate scaling factor for function fct_ID1 (Default = 1). (Real) |
|
| Xscale1 | Abcissa scaling factor for function
fct_ID1. Default = 1 (Real) |
|
| Yscale2 | Ordinate scaling factor for
function fct_ID2. Default = 1 (Real) |
|
| Xscale2 | Abcissa scaling factor for function
fct_ID2. Default = 1 (Real) |
|
| fct_ID3 | Function identifier defining static
Coulomb friction coefficient as a function of
time. (Integer) |
|
| fct_ID4 | Function identifier defining static
Coulomb friction coefficient as a function of normal
force. (Integer) |
|
| Fric_s | Static Coulomb friction
coefficient. If fct_ID3= 0: constant value (Default = 0). If fct_ID3> 0: ordinate scaling factor for function fct_ID2 (Default = 1). (Real) |
|
| Xscale3 | Abcissa scaling factor for function
fct_ID3. Default = 1 (Real) |
|
| Yscale4 | Ordinate scaling factor for
function fct_ID4. Default = 1 (Real) |
|
| Xscale4 | Abcissa scaling factor for function
fct_ID4. Default = 1 (Real) |
Comments
- The slipring is defined by the 2 spring seatbelt elements initially connected to the slipring, El_ID1, El_ID2 and the node node_ID1 are used to define the position of the slipring. The common node between the 2 elements El_ID1 and EL_ID2 must be at the same coordinates as node_ID1.
- node_ID1 and node_ID2 must not be nodes of the seatbelt spring component.
- By default, the
rotation axis of the slipring is defined by
, the normal direction to the plane defined
by the two connected elements. Additionally, the rotation axis of the slipring can be defined by the direction of node_ID1 and node_ID2. the angle between the direction of node_ID1 and node_ID2 and is used to compute the friction.
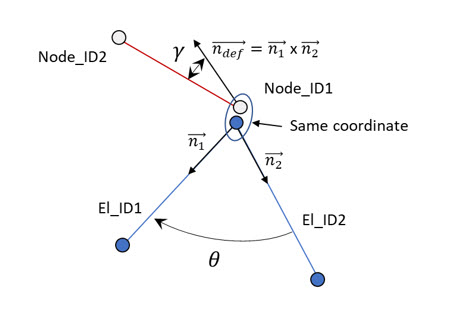
Figure 1. - The Coulomb friction
coefficient is computed with:
(1) Where,- Static friction coefficient
- Dynamic friction coefficient
- Relative slip velocity
They are respectively computed with:(2) (3) - When the slipring is
unlocked, sliding is activated if the difference of force after flow (marked
with *) is lower than the difference of force obtained without flow, and
material flow
is computed accordingly:
with
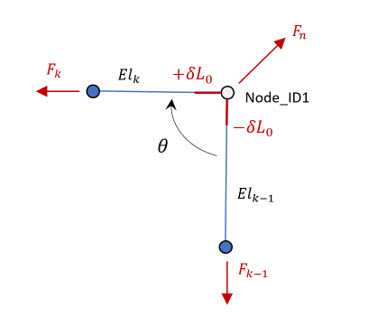
Figure 2. - The common node of the 2 strands of the slipring is kinematically attached to the anchorage node of the slipring node_ID1. No other kinematic condition can be applied to any node of a seatbelt element which can enter the slipring.
- When the length of one
strand reaches zero, the slipring is updated. This strand reappears on the
other side of the slipring and the previously connected strand on that side
leaves the slipring. At the same time, a new spring enters the slipring
replacing the one that has moved. The kinematic condition with the anchorage
node is also switched to the new common node of the strands. The previous
common node is released with an initial velocity computed from the material
flow and direction of the released element, such that the two directions of
the slipring
and
and the angle
are not modified by the update.
(4) 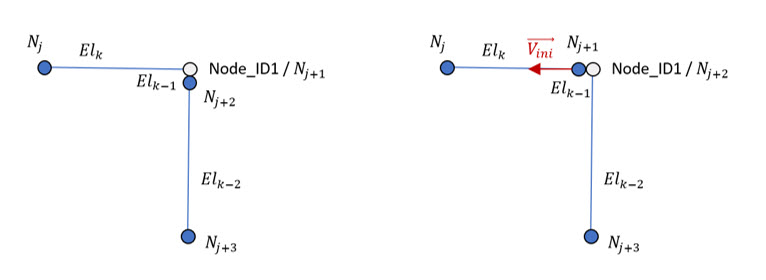
Figure 3. - To ensure element and
time step stability, maximum stiffness value is computed from
defined in seatbelt
material (/MAT/LAW114) and spring element reference
length
.
(5) - When a spring element is in the slipring, viscosity is deactivated.