Kinematic joints are declared by /PROP/KJOINT. Joints are defined
by a spring and two local coordinate axes, which belong to connected bodies.
Assume that the connected bodies are rigid to ensure the orthogonality of their local axis.
However, deformable bodies may also be connected with a joint. If the axis becomes
non-orthogonal during deformation, the stability of the joint cannot be ensured.
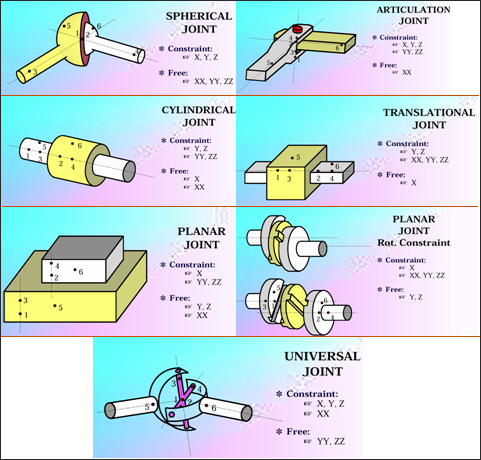
There are several kinds of kinematic joints available in Radioss,
which are listed in Kinematic Joint Types.
Kinematic Joint Types
Type No.
Joint Type
dx
dy
dz
x
y
z
1
Spherical
√
√
√
0
0
0
2
Revolute
√
√
√
0
√
√
3
Cylindrical
0
√
√
0
√
√
4
Planar
√
0
0
0
√
√
5
Universal
√
√
√
√
0
0
6
Translational
0
√
√
√
√
√
7
Oldham
√
0
0
√
√
√
8
Rigid
√
√
√
√
√
√
9
Free
0
0
0
0
0
0
√: denotes a blocked degree of freedom
0: denotes a free (user-defined) degrees of freedom
Joint properties are defined in a local frame computed with respect to two connected
coordinate systems. They do not need to be initially coincident. If the initial
position of the local coordinate axis coincides at any time, the joint local frames
are defined at a mean position. Then the joint local frame will be computed with
respect to these rotated axes.
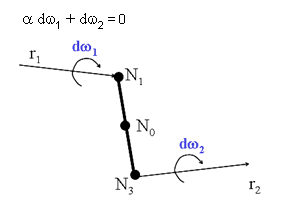
There are a total of six joint degrees of freedom: and . They are computed in the local skew frame.Figure 1. Kinematic Joint Definition
In each type of joint you distinguish the blocked degrees of freedom and the free
degrees of freedom. The blocked degrees of freedom are characterized by a constant
stiffness. Selecting a high value with respect to the free degrees of freedom
stiffness is recommended. The free degrees of freedom have user-defined
characteristics, which can be linear or nonlinear elastic, combined with a
sub-critical viscous damping.
The translational and rotational degrees of freedom are defined as:
Where, and are total displacement of two joint nodes in the
local coordinate system.
Where, and are total relative rotation of two connected body
axes, with respect to the local joint coordinate frame.Figure 2. Schematic Representation of Kinematic Joints
Forces and Moments Calculation
The force in direction is computed as:
Linear spring:
: Translational stiffness
(Ktx,
Kty, and
Ktz)
: Translational viscosity
(Ctx,
Cty, and
Ctz)
Nonlinear spring:
The moment in direction is computed as:
Linear spring:
: Rotational stiffness
(Krx,
Kry, and
Krz)
: Rotational viscosity
(Crx,
Cry, and
Crz)
Nonlinear spring:
The joint length may be equal to 0. It is recommended to use a zero length spring to define a
spherical joint or a universal joint. To satisfy the global balance of moments in a
general case, correction terms in the rotational degrees of freedom are calculated
as:
Joints do not have user-defined mass or inertia, so the nodal time step is always used.