A first order filter, with cutoff frequency R, is used to identify
the dynamic component, x , of the input signal,
X. The transfer functions of the signal sent to the dynamic
and the static models, assuming X0=0, are:
TF of signal to dynamic model =
TF of signal to dynamic model = 1
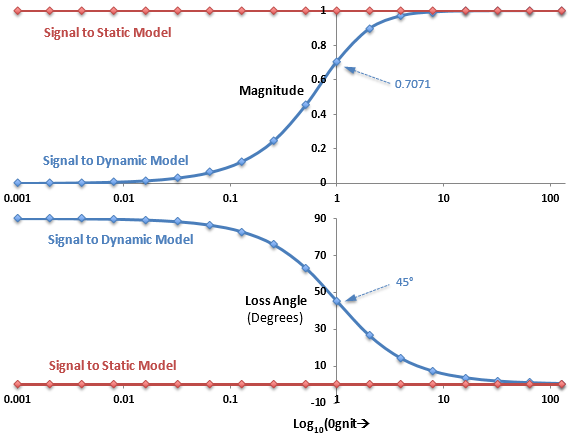
The following are Bode plots for these transfer functions:
Figure 1.
The Bode plots show the magnitude and loss angle of the transfer functions over a
range of operating frequencies:
The top figure plots the magnitude of the transfer function against
.
The bottom figure plots the loss angle of the transfer function against .
Plots of the signal sent to the dynamic model are gray-blue.
Plots of the signal sent to the static model are brick-red.
The log scale used for the x-axis lets you view a wide range of frequencies and
filter behavior as follows:
When ≪ 1, that is at low frequencies, then:
The magnitude of the signal sent to the dynamic model is close to
0.
The loss angle of the signal sent to the dynamic model is close to
90°.
The magnitude of the signal sent to the static model is 1.
The loss angle of the signal sent to the static model is 0°.
The bushing essentially behaves as the static model. The loss angle of
the signal sent to the dynamic model is close to 90°, but this is not
important since the magnitude of the signal is close to zero.
When ≫ 1, that is at high frequencies, then:
The magnitude of the signal sent to the dynamic model is close to
1.
The loss angle of the signal sent to the dynamic model is close to 0°
.
The magnitude of the signal sent to the static model is 1.
The loss angle of the signal sent to the static model is 0°.
The bushing essentially behaves as a dynamic model superimposed on top
of a static model.
When ≫ 1, that is at cut-off frequency, then:
The magnitude of the signal sent to the dynamic model is .
The loss angle of the signal sent to the dynamic model is 45°.
The magnitude of the signal sent to the static model is 1.
The loss angle of the signal sent to the static model is 0°.
The bushing essentially behaves as a dynamic model superimposed on top
of a static model.