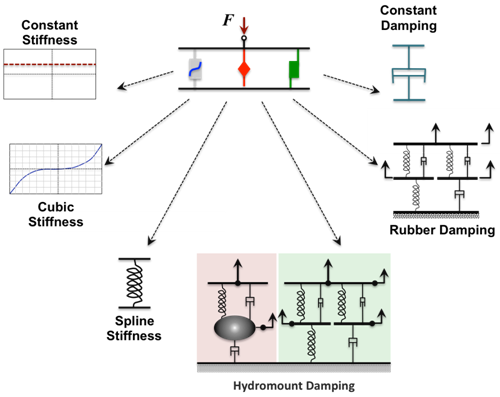
The Altair Bushing Model supports many different
representations of bushing stiffness and damping as illustrated below:Figure 1.
All stiffness models, constant damping and rubber or hydromount damping models are
exported to the .gbs file for each direction. At run time, you
can select the specific model that you want to use.
The following table explains the various models:
Component
Method
Description
Stiffness
Constance Stiffness
F=-K*x; used when the bushing’s stiffness behavior is linear.
The value, x, is the deformation in the direction of
interest.
Cubic Stiffness
F=-h(x); where h(x) is defined by a pair of cubic polynomials
whose coefficients are derived from the measured Force vs.
Displacement data in the .gbs file.
Spline Stiffness
F=-g(x); where g(x) is a cubic interpolation of Force vs.
Displacement data in the .gbs file. Linear
extrapolation is used when the data is outside the range of
specified data.
Damping
Constant Damping
F=-c*v; used when a bushing’s damping behavior is linear. The
value, v, is the deformation velocity in the direction of
interest.
Rubber Damping
An amplitude and frequency dependent bushing model, whose
coefficients are fit to measured data using a tool such as the
AltairModel
Identification Tool. This is primarily used for
fitting rubber bushings.
Hydromount Damping
An amplitude and frequency dependent model for hydrodynamic
mounts, whose coefficients are fit to measured data using a tool
such as the Altair MIT.
You can include stiffness and damping selections in the ACTIVITY BLOCK of the bushing
property file. To learn more about how to make these selections, see: Bushing Property File.