Inputs
Introduction
The total number of user inputs is equal to 13.
Among these inputs, 3 are standard inputs and 10 are advanced inputs.
The maximum line current and the maximum Line-Line voltage allow to define the base speed point and in addition, the maximum speed allows to define the maximum speed point.
Standard inputs
Maximum Line-Line voltage, rms
Current definition mode
- Electrical current can be defined by the current density in electric conductors.
- Electric current can be defined directly by indicating the value of the maximum line current (the rms value is required).
The electrical current, in addition to the maximum Line-Line voltage and the rated power supply frequency allows to define the base speed point.
Maximum line current, rms
- The number of parallel paths and the winding connections are automatically considered in the results.
- The base speed point is also defined by the maximum line-line voltage and the rated power supply frequency.
- In case the “Maximum line current, rms” set in input is higher or lower than those in the range defined by the break down torque and the zero torque, an automatic correction is done to target a realistic value (inside the range).
Maximum current density, rms
The value of the rated current density in electric conductors “Max. current density, rms” (Maximum current density in conductors, rms) must be provided. The rated current density value corresponds to the current density targeted at the base speed point.
Maximum speed
The value of the « Maximum speed » (Maximum speed) must be provided.
The analysis of test results is performed over a given speed range defined between 0 and the maximum speed. This allows the user to evaluate the behavior of the machine as a function of speed (like rotor Joule losses, total losses, power factor...) in this range.
Advanced inputs
Electrical equivalent scheme identification
In the first step of the internal process of computation, it is needed to identify the model (non-linear electrical equivalent scheme – see “Characterization – Model – Motor – Scalar” for more details). That means computation for each component of the electrical scheme (resistance and inductances) maps in function of the Line-Line voltage and the power supply frequency.
The following inputs allow to fix the discretization required to identify the non-linear model.
Model maps identification - Number of computations for Line-Line voltage
The number of computations for the voltage must be defined with the user input « ID - No. Comp. for voltage » (Electrical equivalent scheme identification - Number of computations for Line-Line voltage).
Model maps identification - Number of computations for power supply frequency
The number of computations for the frequency must be defined with the user input « ID - No. Comp. for freq. » (Electrical equivalent scheme identification - Number of computations for power supply frequency).
Operation of the non-linear model to generate T(U,f,s)
In the second step of the internal process of computation, it is needed to operate (solve) the model (non-linear electrical equivalent scheme) to generate sets of curves in function of the Line-Line voltage, the power supply frequency, and the slip to get the performances of the machine as in the T(Slip) test.
Forth following inputs allow to fix the discretization required to operate the non-linear model in order to get the data set of T(U,f,s) curves representing the behavior of the machine in function of the Line-Line voltage, the power supply frequency and the slip (or speed).
Operation of model to generate T(U,f,s) - Number of computations for Line-Line voltage
The number of computations for the voltage must be defined with the user input « OP. - No. comp. for voltage » (Operation of model to generate T(U,f,s) - Number of computations for Line-Line voltage).
Operation of model to generate T(U,f,s) - Number of computations for power supply frequency
The number of computations for the frequency must be defined with the user input « Op. - No. comp. for freq. » (Operation of model to generate T(U,f,s) - Number of computations for power supply frequency).
Operation of model to generate T(U,f,s) – Slip distribution mode
- Slip distribution mode = Logarithmic
When “Logarithmic” is selected, the distribution of the computed points is automatically done. The number of computations to be done in the slip range must be set in the next field: “No. comp. in slip range”.
- Slip distribution mode = Linear
When “Linear” is selected, the distribution of the computed points is automatically done. The number of computations to be done in the slip range must be set in the next field: “No. comp. in slip range”.
- Slip distribution mode = Table
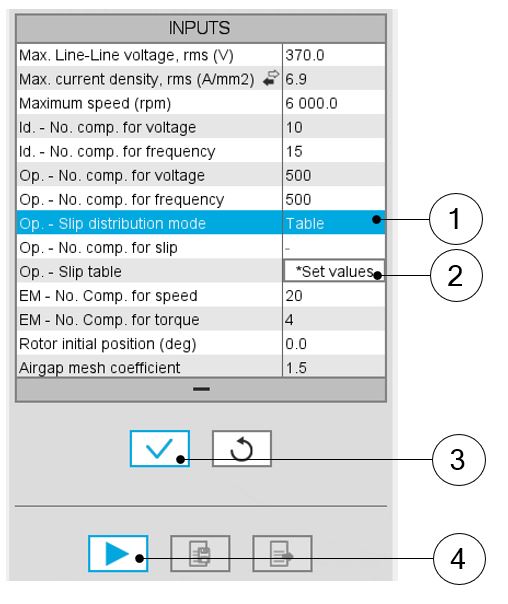
When “Table” is selected, the list of slips to be considered must be defined by using the field: “Slip table” and then clicking on the button “Set values”.
Two ways are possible to fill the table: either filling the table line by line or by importing an excel file, where all the slips to be considered are defined.Note: The slips must be listed in ascending order.
 |
|
| Slip distribution mode = Table | |
| 1 | Select the “Table” option. |
| 2 | Click the button “Set values” of the field “Slip table” to open a dialog box defining the list of slips to be considered. Refer to the next illustration which shows how to fill the Slip table. |
| 3 | Button to validate and consider the user inputs |
| 4 | Button to run the computation |
 |
|
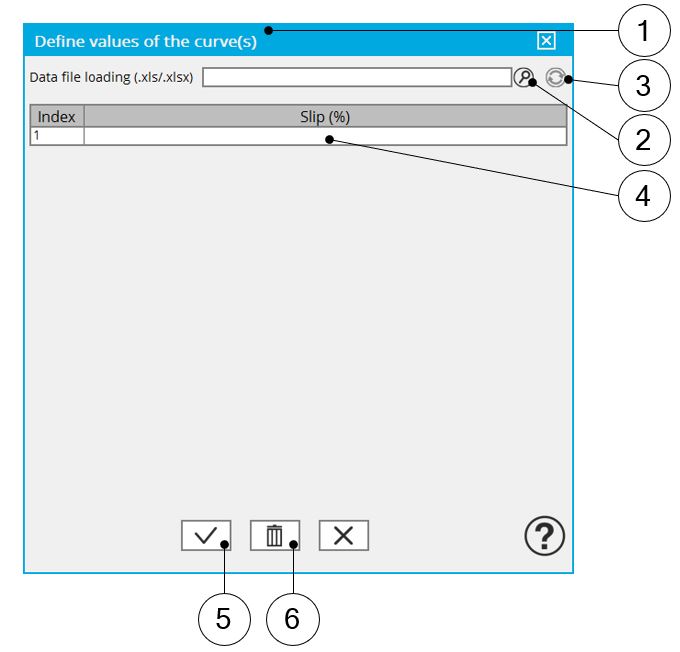
| Slip distribution mode = Table – Dialog box to define the list of slips | |
| 1 | Dialog box opened when clicking on the button “Set values” in the field “Slip table” |
| 2 | Browse the folder to select an Excel file which defines the list of slips |
| 3 | Button to refresh the table data when the considered Excel file has been modified |
| 4 | Fields to be filled with data to describe the considered slips |
| 5 | Button to apply the inputs |
| 6 | Button to erase the data table |
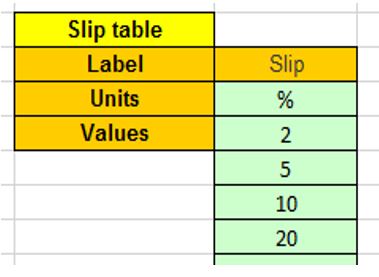 |
| Excel file template to define the list of slips |
- The slips must be listed in ascending order.
- We recommend defining at least 100 values to get an accuracy high enough, (especially since going below 100 does not lead to a significant reduction in computation time).
Operation of model to generate T(U,f,s) - Number of computations for slip
The number of computations for the slip must be defined with the user input « Op. - No. comp. for slip » (Operation of model to generate T(U,f,s) - Number of computations for slip).
The default value is equal to 100. This default value provides a good overview of the machine behavior.
- The machine operating mode is “Motor”, so the slip range is [0,1].
- The slip distribution mode used is logarithmic or linear.
- The computation time of the test is not highly impacted by this input and huge values such as 200 can be used.
Operation of model to generate T(U,f,s) – Slip table
Efficiency map computation parameters
As a final step of the internal process of computation, it is needed to apply the scalar command.
The command is applied to the data set generated in the previous step (Operation of model to generate T(U,f,s)) through an automatic post-processing.
With this post-processing the behavior of the machine in the torque speed plane is obtained in consistency with the scalar command.
The following inputs allow to fix the discretization required to compute the efficiency map and associated results in the torque-speed plane.
EM - Number of computations for speed
The “EM - No. comp. for speed” (Efficiency map - Number of computations for speed) corresponds to the number of points to be considered in the speed range from 0 to the maximum speed.
Half of these points are distributed from 0 to the base speed. The remaining points are distributed from the base speed to the maximum speed.
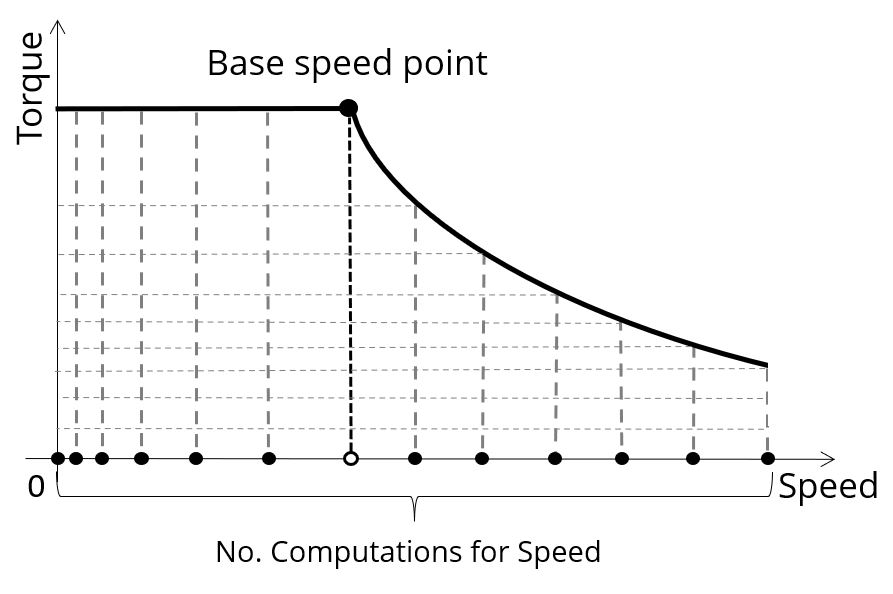 |
| Definition of the number of computations for speed |
EM - Number of computations for torque
For the speed range [Nbase; Nmax.], the number of computations for torque is imposed by the number of computations for the defined speed range [Nbase; Nmax.] (Red points in the image shown below).
The advanced user input parameter “EM - No. comp. for torque” (Efficiency map - Number of computations for torque) allows to finalize the grid within the torque range [0, T (Nmax.)] at the maximum speed (Black points in the image shown below).
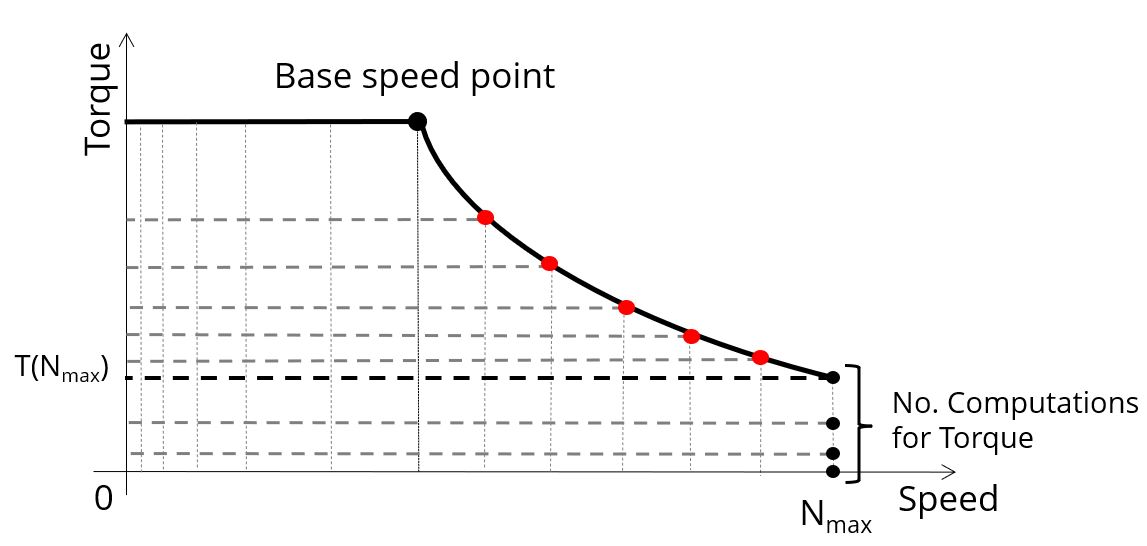 |
| Definition of the number of computations for torque |
Skew model – No. of layers
When the rotor bars or the stator slots are skewed, the number of layers used in Flux® Skew environment to model the machine can be modified: “Skew model - No. of layers” (Number of layers for modelling the skewing in Flux® Skew environment).
Rotor initial position
The initial position of the rotor considered for computation can be set by the user in the field « Rotor initial position » (Rotor initial position). The default value is equal to 0.
The range of possible values is [-360, 360].
The rotor initial position has an impact only on the induction curve in the air gap.
Airgap mesh coefficient
The advanced user input “Airgap mesh coefficient” is a coefficient that adjusts the size of mesh elements inside the airgap. When the value of “Airgap mesh coefficient” decreases, the mesh elements get smaller, leading to a higher mesh density inside the airgap, thereby increasing the computation accuracy.
The imposed Mesh Point (size of mesh elements touching points of the geometry), inside the Flux® software, is described as:
MeshPoint = (airgap) x (airgap mesh coefficient)
Airgap mesh coefficient is set to 1.5 by default.
The variation range of values for this parameter is [0.05; 2].