
margin
Margin stability.
Syntax
margin(sys)
margin(sys, tol)
[gm, pm, Wgm, Wpm] = margin(...)
Inputs
- sys
- A linear time-invariant transfer function or state-space system.
- tol
- The tolerance below which small values are ignored (default: sqrt(eps)).
Outputs
- gm
- The gain margin as a ratio, not in decibels.
- p
- The phase margin in degrees.
- Wgm
- The frequency at which the gain margin is assessed, also known as the phase crossover.
- Wpm
- The frequency at which the phase margin is assessed, also known as the gain crossover.
Example
Create the bode plot with the margin information for the system
below.Figure 1. margin Example
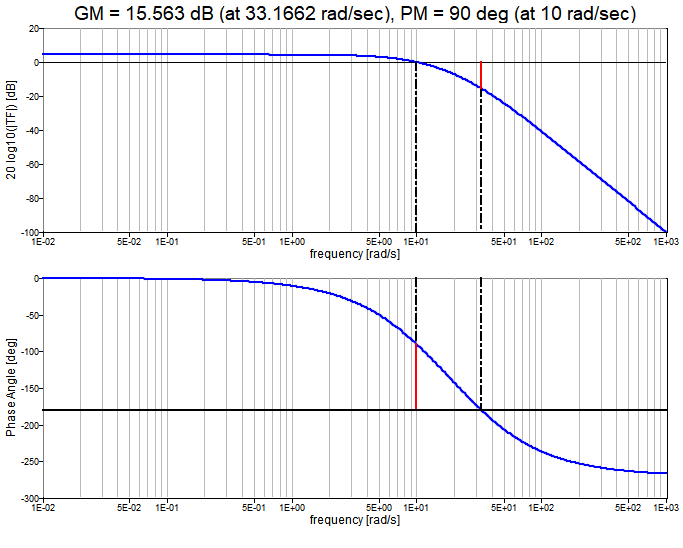
s = tf('s');
GH = 10000 / ((s+10)*(s+20)*(s+30));
margin(GH);Comments
If the output arguments are omitted, the bode plot is displayed with the margin information.