MV-1025: Model Point-to-Curve (PTCV) Higher-Pair Constraint
In this tutorial you will learn how to model a PTCV (point-to-curve) joint.
A PTCV (point-to-curve) joint is a higher pair constraint. This
constraint restricts a specified point on a body to move along a specified curve on
another body. The curve may be open or closed, planar or in 3-d space. The point may
belong to a rigid, flexible or point body. This constraint can help avoid modeling
contact in some systems. It may prove advantageous since proper contact modeling (refer
to 3D Mesh-to-Mesh Contact Simulation) in many
cases involves fine-tuning of contact parameters. One good example for such a system is
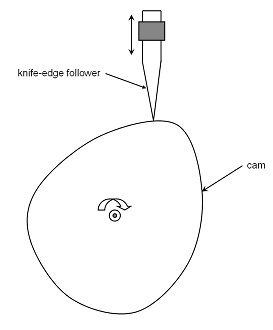
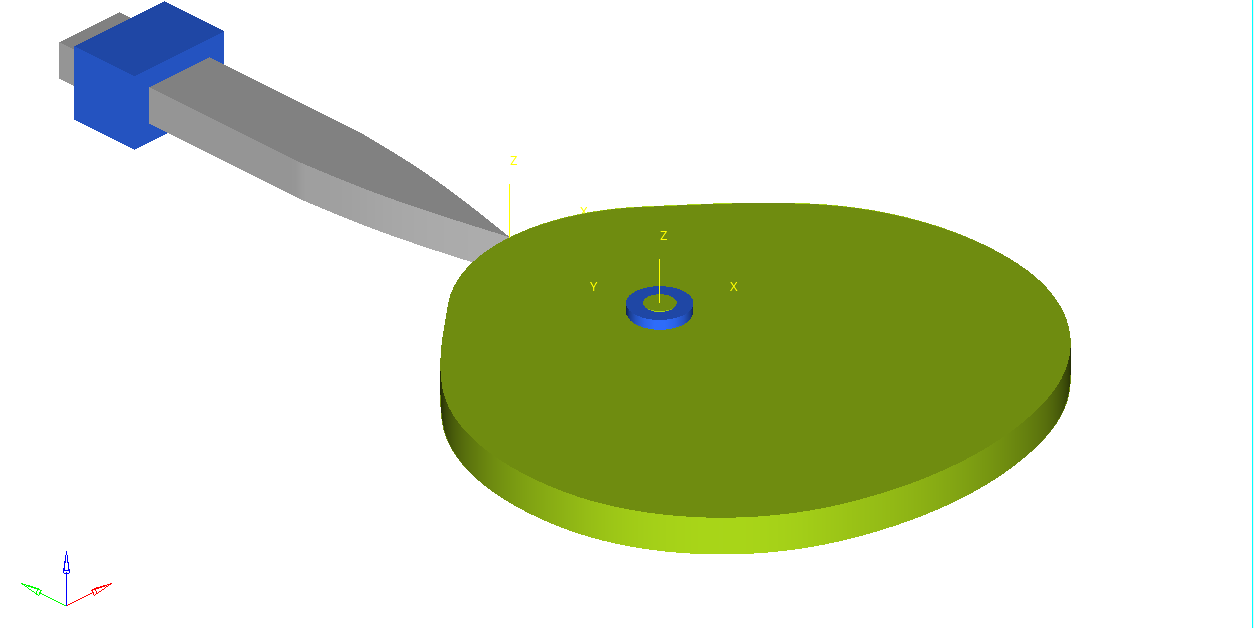
a knife-edge cam follower mechanism. You can avoid modeling the contact between the cam
and follower by defining a PTCV joint: the curve being the cam profile and the point
being the tip of the follower.Figure 1. A Knife-edge Cam Follower Mechanism In this tutorial, you will model a knife-edge cam follower mechanism with the help
of a PTCV joint.
Create Points
In this step you will create points for the model.
Copy all the files from the
mbd_modeling\interactive folder to your <working
directory>.
Start a new MotionView session.
We will work with the default units (kg, mm, s, N).
Open the Add Point or PointPair dialog in one of the
following ways:
From the Project Browser right-click on
Model and select Add Reference Entity > Point.
On the Model-Reference toolbar, right-click the (Point) icon.
For Label, enter PivotPoint. Accept the default Variable
name.
Click OK.
Click the Properties tab and specify the X, Y, and Z
coordinates as 0.0.
Repeat steps 2
through 5 to
create the points specified in Table 1.
Table 1.
Point
X
Y
Z
FollowerCM
0.0
65.557
0.0
FollowerPoint
0.0
25.0
0.0
FollowerJoint
0.0
85.0
0.0
CamCM
0.0
-14.1604
0.0
Create Bodies
In this step you will create the Cam and Follower bodies.
You will use pre-specified inertia properties to define the bodies.
Open the Add Body or BodyPair dialog in one of the
following ways:
From the Project Browser right-click on
Model and select Add Reference Entity > Body.
On the Model-Reference toolbar, right-click on the (Body) icon.
Add the Cam and Follower bodies.
For the first Label, enter Cam.
Click Apply.
For the second Label, enter Follower.
Click OK to close the
Add Body or BodyPair dialog.
The bodies you created will appear in the Model Tree under the Bodies folder.
In the Properties tab of the panel for each body,
specify the information given in Table 2.
Table 2.
Body
Mass
Ixx
Iyy
Izz
Ixy
Iyz
Izx
Cam
0.174526
60.3623
63.699
123.276
0.0
0.0
0.0
Follower
0.0228149
7.10381
0.219116
7.22026
0.0
0.0
0.0
Note: Clear the Get Properties from
associated Graphic(s) check box.
Specify the CM Coordinate tab settings for the Cam body.
Check the Use center of mass coordinate system
box.
Double-click .
In the Select a Point dialog, choose
CamCM.
Click OK.
Accept the defaults for axes orientation properties.
Specify the CM Coordinate tab settings for the Follower body.
Check the Use CM Coordsys box.
Double-click .
In the Select a Point dialog, choose
FollowerCM.
Click OK.
Accept the defaults for axes orientation properties.
Create Joints
In this step you will define the revolute joint and the translational joint needed
for the model.
The revolute joint is between the Cam and Ground Body. The translational joint is
between the Follower and the Ground Body. You will define the PTCV joint in a different
step.
Open the Add Joint or JointPair dialog in one of the
following ways:
From the Project Browser, right-click on
Model and select Add > Constraint > Joint.
On the Model-Constraints toolbar, click the (Joints) icon.
Create the CamPivot joint.
In the Add Joint or JointPair, for Label enter
CamPivot.
For Type, select Revolute Joint.
Click OK.
In the Connectivity tab, double click on and resolve it to
Cam.
Resolve to Ground Body and
click OK.
In the Connectivity tab, double click and resolve it to
PivotPoint.
Change the Alignment Axis to . Resolve Vector to Global
Z.
Create the FollowerJoint.
In the Add Joint or JointPair, for Label enter
FollowerJoint.
For Type, select Translational Joint.
Click OK.
In the Connectivity tab, double click on and resolve it to
Follower.
Resolve to Ground Body and
click OK.
In the Connectivity tab, double click and resolve it to
FollowerJoint.
Change the Alignment Axis to . Resolve Vector to Global
Y and click OK.
Create Markers
In this step you will define markers required for defining the PTCV
joint.
You need a marker associated with the Cam (for the curve) and one associated with
the Follower (for the point).
Open the Add Marker or MarkerPair dialog in one of the
following ways:
From the Project Browser, right-click on
Model and select Add > Reference Entity > Marker.
On the Model-Reference toolbar, click the (Marker) icon.
Create the CamMarker.
In the Add Marker or MarkerPair dialog, for Label
enter CamMarker.
Click OK.
In the Properties tab, double click on and resolve it to
Cam and click OK.
In the Properties tab, double-click and resolve it to
PivotPoint.
Click OK. Accept the
defaults for axes orientation.
Create the FollowerMarker.
In the Add Marker or MarkerPair dialog, for Label
enter FollowerMarker.
Click OK.
In the Properties tab, double click on and resolve it to
Follower and click OK.
In the Properties tab, double-click and resolve it to
FollowerPoint.
Click OK. Accept the
defaults for axes orientation.
Create Graphics
In this step you will load graphics for the Cam and Follower and create graphics for
the joints in the model.
Graphics for the cam and follower have been provided as h3d files. We need to
associate the h3ds with bodies defined in our model.
Open the Add Graphics or GraphicPair dialog in one of the
following ways:
From the Project Browser, right-click on
Model and select Add > Reference Entity > Graphics.
On the Model-Reference toolbar, click the (Graphics) icon.
From the dialog, for Label, enter Cam.
From the drop-down menu, click File.
Figure 2.
Click the (File Browser) icon and open the
CamProfile.h3d from the model folder.
Click OK.
In the Connectivity tab, double-click on and
resolve the graphic to the Cam body.
Repeat step 1 to
create another graphic. For Label, enter Follower.
From the drop-down menu, click File.
Click the (File Browser) icon and open the
FollowerProfile.h3d from the model folder.
Click OK.
In the Connectivity tab, double-click on and
resolve the graphic to the Follower body.
Create cylinder graphics for the Cam pivot in your model using the
specifications listed in Table 3.
Table 3.
Label
Type
Direction ()
PivotGraphicOne
Cylinder
Ground Body
PivotPoint
Global Z
PivotGraphicTwo
Cylinder
Cam
PivotPoint
Global Z
In the Project Browser, click
PivotGraphicOne.
In the Properties tab, specify the values listed in Table 4:
Table 4.
Property
Value
Length
7.5
Offset
-3.75
Radius 1
4.000
Radius 2
4.000
For Cap properties, choose Cap Both Ends.
In the Project Browser, click
PivotGraphicTwo.
In the Properties tab, specify the values listed in Table 5:
Table 5.
Property
Value
Length
7.6
Offset
-3.8
Radius 1
2.000
Radius 2
2.000
For Cap properties, choose Cap Both Ends.
Create a box graphic for the Follower translational joint with the
specifications in Table 6 and the Properties listen in Table 7.
Table 6.
Label
Type
Z-Axis ()
XZ Plane ()
FollowerJointGraphic
Center (choose this option in the Connectivity
tab)
Ground Body
FollowerJoint
Global Z
Global X
Table 7.
Property
Value
Length X
15
Length Y
10
Length Z
10
Your model should look like the example in Figure 3. Figure 3. A Knife-edge Cam Follower Mechanism in MotionView
Create the Curve
In this step you will create the curve that defines the profile of the
Cam.
You will use data provided in .csv format to define the
curve.
Open the Add Curve dialog by doing one of the
following:
From the Project Browser, right-click on
Model and select Add > Reference Entity > Curve.
On the Model-Reference toolbar, click the (Curves) icon.
For Label, enter CamProfile and click
OK.
In the Properties tab, click the first drop-down menu and change the curve from
2D Cartesian to 3D Cartesian.
Click the fourth drop-down menu and set the curve type to Closed
curve.
Click the x radio button.
Click and open CamProfile.csv.
Choose the properties of the curve given in Figure 4.
Figure 4.
Click the y radio button. Change the Component to
Column 2.
Figure 5.
Click the z radio button. Change the Component to
Column 3.
Figure 6.
Create the PTCV Joint
In this step, you will create the PTCV joint.
Open the Add AdvJoint dialog by doing one of the
following:
From the Project Browser, right-click on
Model and select Add > Constraint > Advanced Joint.
On the Model-Reference toolbar, click the (Advanced Joint)
icon.
In the dialog, enter the Label PTCV.
From the drop-down menu, choose PointToCurveJoint and
click OK.
Configure the Connectivity tab for the PTCV joint.
Double click . In the dialog, choose
Follower and click OK.
Double click . In the dialog, choose
FollowerPoint and click OK.
Double click . In the dialog, choose
CamProfile and click OK.
Double click . In the dialog, choose
CamMarker and click OK.
Specify the Cam Motion
In this step, you will specify a motion for the cam using an expression.
Open the Add Motion or MotionPair dialog by doing one of
the following:
From the Project Browser, right-click on
Model and select Add > Constraint > Motion.
On the Model-Reference toolbar, click the (Motion) icon.
In the dialog, enter the Label CamMotion and click
OK.
In the Connectivity tab, double-click . Choose CamPivot and click OK.
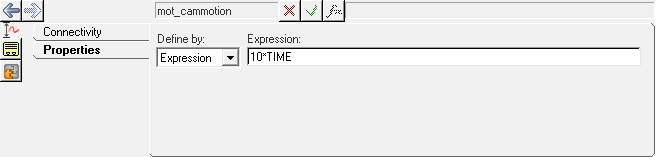
in the Properties tab, in the drop-down menu define the motion by
Expression.
Enter `10*TIME` in the Expression field.
Figure 7.
Specify Gravity
In this step you will specify the gravity in the negative Y direction.
In the Project Browser, click to expand Misc. > Forms.
In the Forms folder, click Gravity. In the panel,
specify the following values:
X Component = 0
Y Component = -9810
Z Component = 0
Specify Output Requests
In this step you will specify the output requests in order to monitor the reaction on
the PTCV joint.
Open the Add Output dialog by doing one of the
following:
From the Project Browser, right-click on
Model and select Add > General MDL Entity > Output.
On the General toolbar, click the (Outputs) icon.
In the dialog, for Label enter PTCV Reaction and click
OK.
In the Properties tab, from the drop-down menu define the output by
Expression.
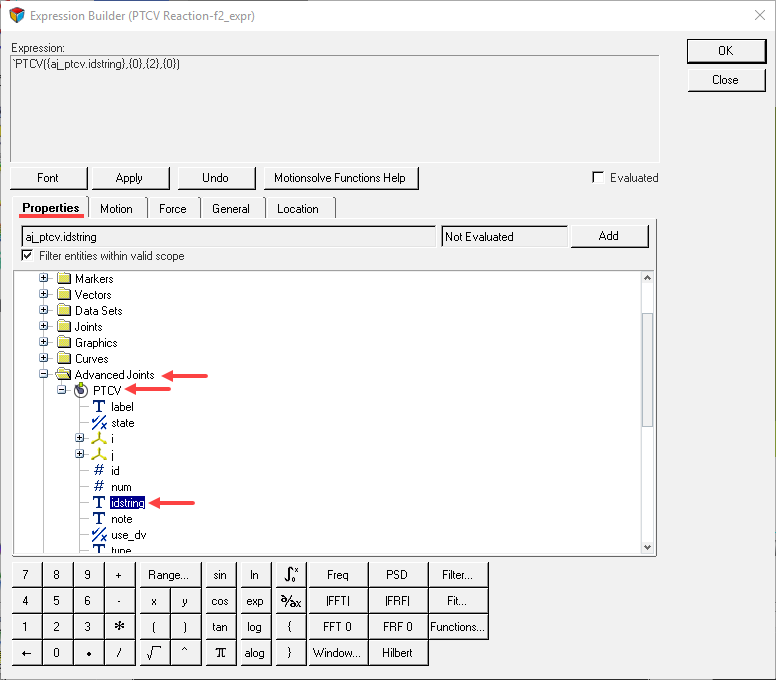
Click in the F2 field to activate the button.
Click the button.
In the Expression Builder, populate the expression as
'PTCV({aj_0.idstring},0,2,0)'.
Figure 8.
Click OK.
Repeat steps 4
through 6 for F3,
F4, F6, F7, and F8 by changing the third parameter in the expression to
3, 4,
6, 7, and 8
accordingly.
The PTCV (id, jflag,
comp, ref_marker) function returns the
reaction on the PTCV joint:
id ID of the PTCV joint
jflag 0 gives reaction on the I-marker and 1 on
J-marker
comp component of the reaction
ref_marker reference marker (0 implies Global
Frame)
Run the Model
In this step you will run the knife-edge cam follower model.
The model is now defined completely and is ready to run.
On the toolbar, click (Run).
In the Run panel, specify the values shown in Figure 9.
Figure 9.
Click the Save and run current model radio button.
Click the (browser icon) and specify a name for the solver
file.
Click Save.
Click the (Check Model) button to check the model for
errors.
To invoke the solver, click the Run button.
Once the solver has finished, click the (Start/Pause Animation) button to view the
animation.
View the Results
In this step you will learn how to view the animation and plot the Y displacement of
the follower.
Once the solver has finished, the Animate button will be active. Click on
Animate.
Click the (Start/Pause Animation) button
to view the animation.
One would also like to inspect the displacement profile
of the follower in this mechanism. For this, you will plot the Y position of
the center of mass of the follower.
From the Page Controls toolbar, click > . Click in the window on the lower right to make it the active
window.
In the Select application drop-down menu, change the client from MotionView to HyperGraph 2D.
On the Curves toolbar, click (Build Plots).
Click the (file browser) and open the
results.abf file.
Click Apply. This will plot
the Y profile of the center of mass of the follower.
The profile for the Y-displacement of the follower should look like the one in
Figure 11. Figure 11.
If you set the x-axis properties to zoom in on the cycle, the profile looks as
shown in Figure 12.Figure 12.
Check the Model for Potential Lift-Off
In this step, you will check the knife-edge cam follower mechanism for potential
lift-off by plotting the Y-reaction on the follower.
In some cases, the dynamics of the system may cause the follower to lose contact
with the cam. This is called ‘lift-off’. In such cases, modeling the system with a PTCV
will give you incorrect results because the joint constrains the follower point to
always be on the curve (and hence cannot model lift-offs). For such cases, you must use
contact modeling (refer to 3D Mesh-to-Mesh Contact Simulation). However,
you will want to start with a PTCV model since it is a lot easier than modeling contact.
Given this scenario, model the system using a PTCV joint and monitor the PTCV joint
reaction. If the reaction on the follower is a ‘pulling’ reaction, this indicates
lift-off would have occurred and you must switch to a contact model. Otherwise, the
contact model is unnecessary. Now, you will check the model you used in the tutorial.
The follower is moving along the Y-axis, so any negative reaction along the Y-axis is a
'pulling' reaction.
Click (Add Page) to add a new page to the session.
Switch the client to HyperGraph 2D.
Click on (Build Plots).
Click on (browser icon) and load the
results.abf file.
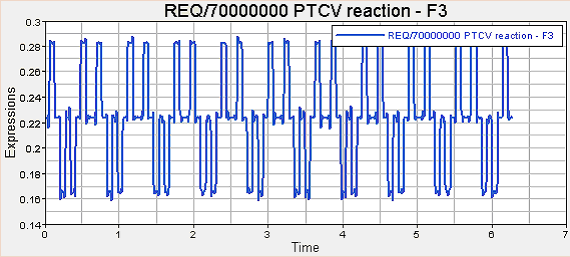
The profile should look like the one shown in Figure 14.Figure 14.
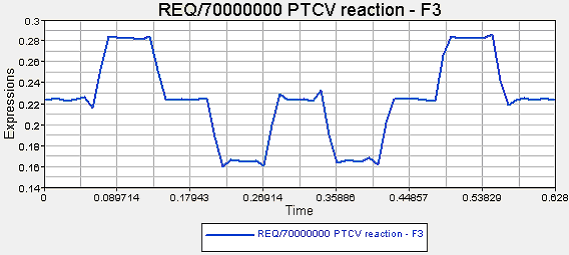
Scale the x-axis to view one cycle on the profile.
Figure 15. As shown in Figure 15, the Y component of the PTCV reaction on the follower is always positive.
There is no pulling reaction, so the PTCV model is acceptable for this
mechanism.

 (Point) icon.
(Point) icon. (Body) icon.
(Body) icon. .
.
 (Joints) icon.
(Joints) icon.  and resolve it to
Cam.
and resolve it to
Cam.
 to Ground Body and
click OK.
to Ground Body and
click OK.
 . Resolve Vector to Global
Z.
. Resolve Vector to Global
Z.
 (Marker) icon.
(Marker) icon. and resolve it to
Cam and click OK.
and resolve it to
Cam and click OK.
 (Graphics) icon.
(Graphics) icon.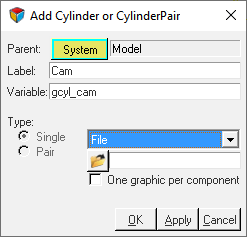
 (File Browser) icon and open the
CamProfile.h3d from the model folder.
(File Browser) icon and open the
CamProfile.h3d from the model folder.
 (Curves) icon.
(Curves) icon. and open CamProfile.csv.
and open CamProfile.csv.



 (Advanced Joint)
icon.
(Advanced Joint)
icon. . In the dialog, choose
CamProfile and click OK.
. In the dialog, choose
CamProfile and click OK.
 . In the dialog, choose
CamMarker and click OK.
. In the dialog, choose
CamMarker and click OK.
 (Motion) icon.
(Motion) icon. . Choose CamPivot and click OK.
. Choose CamPivot and click OK.
 (Outputs) icon.
(Outputs) icon. button.
button.
 (Run).
(Run).

 (Check Model) button to check the model for
errors.
(Check Model) button to check the model for
errors.
 (Start/Pause Animation) button to view the
animation.
(Start/Pause Animation) button to view the
animation.
 >
>
 . Click in the window on the lower right to make it the active
window.
. Click in the window on the lower right to make it the active
window.
 .
.
 (Build Plots).
(Build Plots).

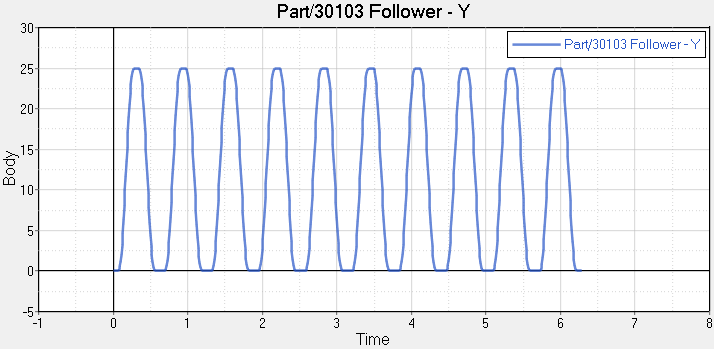 If you set the x-axis properties to zoom in on the cycle, the profile looks as shown in Figure 12.
If you set the x-axis properties to zoom in on the cycle, the profile looks as shown in Figure 12.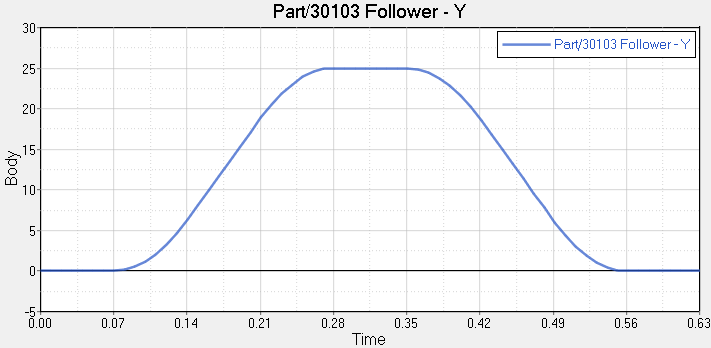
 (Add Page) to add a new page to the session.
(Add Page) to add a new page to the session.