MV-1012: Analytical Contact Simulation Using MotionView and
MotionSolve
Tutorial Level: Intermediate This tutorial will guide you through the new analytical 3-D rigid body contact
capabilities in MotionView.
In this tutorial, you will learn how to setup semi-analytical contact between a
primitive spherical geometry and a meshed geometry, perform a transient analysis to
calculate the contact forces between these geometries, process the results, compare the
analysis time when using meshed representation for the spheres. For these purposes, you
will make use of a ball bearing model.
When one or both of the
rigid bodies in contact are primitive spheres, MotionSolve uses a semi-analytical or fully analytical contact method respectively to
calculate the penetration depth(s) and subsequently the contact force(s). This is
explained in Table 1.
Table 1.
Body I Graphic
Body J Graphic
Contact method
Description
Primitive Sphere
Mesh
Sphere – Mesh
A semi-analytical contact method that computes contact
between the primitive sphere (Body I) and the tessellated
geometry (Body J).
Primitive Sphere
Primitive Sphere
Sphere – Sphere
A fully analytical contact method that is independent of the
tessellation of either graphics.
There are several 3D contact applications that involve spherical
geometries (ball bearings, re-circulating ball systems and so on) – using the analytical
approach for computing the contact forces in such scenarios offers several benefits:
The simulation time is reduced when using the semi-analytical or fully
analytical approach.
The simulation is more robust since the dependence on the mesh quality is
removed.
The simulation results are often more accurate since there are no or lesser
effects of mesh discretization.
Load the Model in MotionView
In this step you will load a ball bearing model in MotionView.
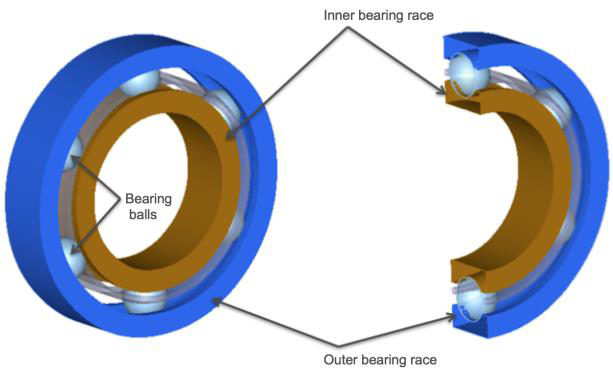
A ball bearing is a type of bearing that consists of balls located between the
outer and inner bearing races. The balls are in contact with both the outer and inner
races. The purpose of the balls is mainly to support radial loads between the two races
while minimizing losses due to friction. Since the balls roll in between the two races,
the friction is drastically reduced as compared to two surfaces sliding against each
other. Figure 1. A typical ball bearing geometry with six balls. A cutaway section shows how
the balls are in contact with the outer and inner races. The geometries for all surfaces except the balls are meshed in this geometry. Only
the six balls are defined as primitive spheres.
Copy the files Ball_Bearing.mdl and
bearing_graphic.h3d, located in the
mbd_modeling\contacts folder, to your <working
directory>.
Start a new MotionView session.
Open the Ball_Bearing.mdl model file from the
<working directory>.
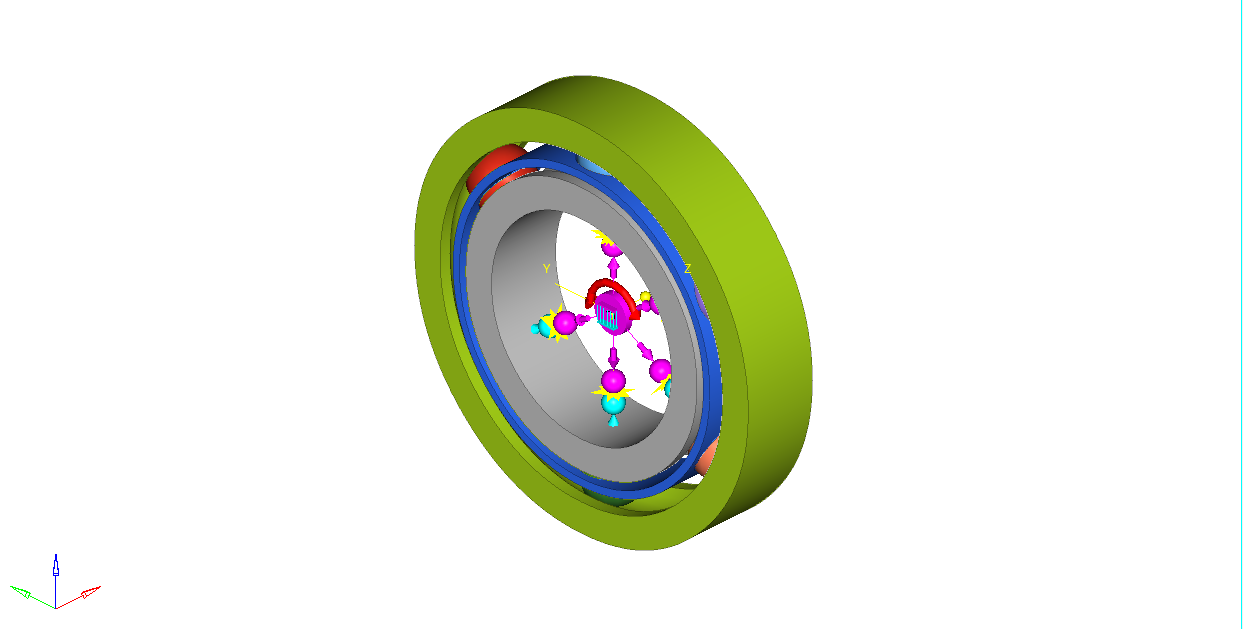
Figure 2. MotionView model for the ball bearing
mechanism Figure 2 shows the
model as it is setup in MotionView. This model has
all the necessary contacts defined except for a few which you will setup next.
Table 2 describes
the components present in this model.
Table 2.
Component Name
Component Type
Description
Ground Body
Rigid body
Ground Body
Outer Race
Rigid body
The outer bearing race body
Inner Race
Rigid body
The inner bearing race body
Ball 1, , Ball 6
Rigid body
Ball bodies
Rim
Rigid body
The rim body that keeps the balls in place
Ball1_inter, …, Ball5_inter
3d rigid body contact
Contact force element between the balls and the
Rim
Ball1_upper, … Ball5_upper
3d rigid body contact
Contact force elements between the balls and the Outer
Race
Ball1_inter, …, Ball5_inter
3d rigid body
Contact force elements between the balls and the Inner
Race
Solver Units
Data Set
The solver units for this model. These are set to Newton,
Millimeter, Kilogram, Second
Gravity
Data Set
Gravity specified for this model. The gravity is turned
on and acts in the negative Z direction
Outer Race Graphic
Graphic
The graphic that represents the outer race body. This is
a tessellated graphic
Inner Race Graphic
Graphic
The graphic that represents the inner race body. This is
a tessellated graphic.
Rim Graphic
Graphic
The graphic that represents the rim body. This is a
tessellated graphic
Ball1 - primitive, … Ball6 - Primitive
Graphic
The graphics that represent the ball bodies. These are
primitive geometries
Inner RaceRev
Revolute Joint
Revolute joint defined between the Inner Race and Ground
Body
Outer Race Fixed
Fixed Joint
Fixed joint defined between the Outer Race and Ground
Body
Input Motion to Inner Race
Motion
A motion defined on the Inner Race Rev joint that
actuates the mechanism
Define Contact Between the Primitive and Meshed Geometries
In this step, you will define contact between Ball 6 and the Outer Race, Ball 6 and
the Rim, and Ball 6 and the Inner Race.
To add a new contact force entity, in the Force Entity toolbar right-click on
the Contact button.
Figure 3.
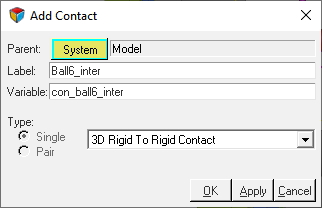
The Add Contact dialog is displayed.
From the dialog, specify the Label as Ball6_inter and
the Variable as con_ball6_inter.
Verify that 3D Rigid To Rigid Contact is selected in the drop-down menu and
click OK.
Figure 4. This will display the Contact panel.
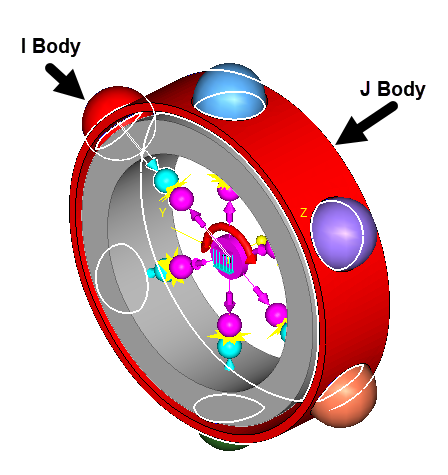
From the Connectivity tab, resolve I Body to
Ball 6 and J Body to
Rim.
This will automatically select the graphics that are attached to these
bodies.Figure 5.
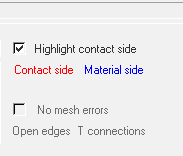
To make sure that the geometries are well defined for contacts, the normals of
the surface mesh should be along the direction of contact and there should be no
open edges or T-connections in the geometries. To make sure that the normals are
oriented correctly, activate the Highlight contact side
box.
This will color the geometries specified for this contact force
according to the direction of the surface normals. You should make sure both
geometries are completely red, in other words there are no blue patches for
either geometry.
Note: To see this clearly, you may have to deactivate the
Outer Race graphic.Figure 6. Checking for incorrect surface normals Figure 7.
To check for open edges or T-connection, check if the Highlight mesh errors
option is active.
If the option is active, activate the Highlight mesh
errors box.
This will highlight any open edges or T Connections in the
geometry. The graphics associated in this contact entity don’t have mesh
errors. Hence you should see Highlight mesh errors grayed
out.
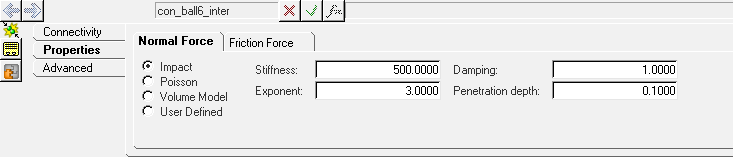
Specify the contact properties.
Click on the Properties tab.
In the Normal Force and the Friction Force property tabs, specify the
properties in Figure 8.
Figure 8.
Repeat steps 1
through 3 to
create contacts between the Ball 6 body and the Outer Race as well as the Ball 6
Body and the Inner Race. Use the details in Table 3.
Table 3.
Label
Ball6_outer
Ball6_inner
Varname
con_ball6_outer
con_ball6_inner
I Body graphic
Ball 6 – Primitive
Ball 6 – Primitive
J Body graphic
Outer Race Graphic
Inner Race Graphic
Normal Force Model
Impact
Impact
Stiffness
1000.0
1000.0
Exponent
2.1
2.1
Damping
0.1
0.1
Penetration Depth
0.1
0.1
Friction Force Model
Static and Dynamic
Static and Dynamic
Mu Static
0.4
0.5
Mu Dynamic
0.2
0.3
Stiction transition velocity
1.0
1.0
Friction transition velocity
1.5
1.5
Save your model.
Setup a Transient Simulation and Run the Model
In this step you will setup and run a transient analysis for the model.
To setup a transient analysis, on the toolbar, click the (Run) button.
From the Run panel, change the Simulation type to
Transient and specify an end time of
2.0 seconds.
Click on the Simulation Settings button and navigate to
the Transient tab.
Set the Maximum step size to 1e-5and click
Close.
Figure 9.
Specifying a smaller step size than the default will help you
obtain more accurate results.
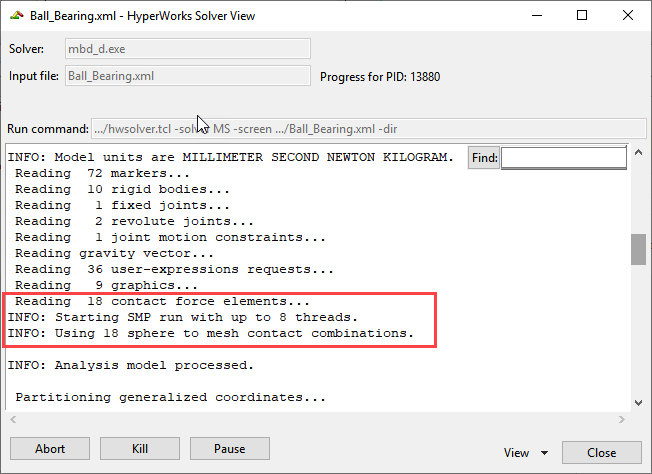
Specify a name for your XML model and click the Run button.
Figure 10.
A message from the solver is displayed that confirms the semi-analytical
contact method is being used for the contact calculations. Figure 11.
Note: As you may have noticed, you did not have to explicitly specify the
contact force method to be used. MotionSolve
automatically detects if one or both the bodies in contact are primitive
spheres and accordingly changes the contact force method being
used.
Post-Process the Results
In this section, you will view and analyze the reports MotionView generates after running the simulation.
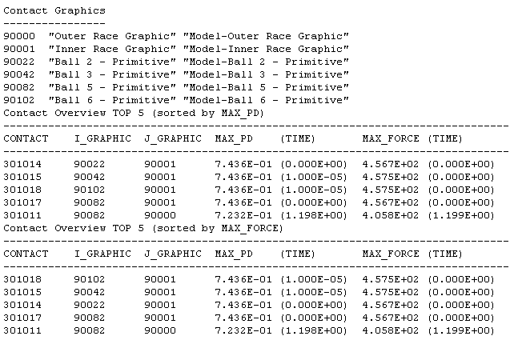
After the simulation is complete, MotionSolve prints
out a summary table (both on screen and in the log file generated) that lists the top
five contact pairs ordered by maximum penetration depth and by maximum contact force for
this simulation. This is very useful since it can be used to verify that the model is
behaving as intended even before loading the results (ABF, MRF, PLT or H3D) files. You
can also use this table to verify that the penetration depths and contact forces are
within the intended limits for your model. Figure 12.
MotionView makes available an automated report for
model containing contacts. The report automatically adds animation and plots to
the session. To access the report, from the menu bar
click Analysis > View Reports.
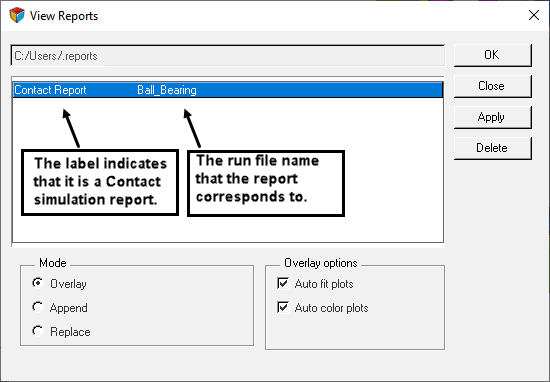
The View Reports dialog is displayed.
From the dialog, select Contact Report and click
OK.
Note: The report item for the last submitted run will be listed at the
top.
Figure 13.
This will add additional pages to the report.
Use the Page Navigation buttons (located at the upper right
corner of the window, below the menu bar and above the graphics area) to view
these pages.
View the Contact Summary.
MotionSolve writes out a static load case to the
H3D file that can be used to view the maximum penetration on all the geometry in
contact throughout the length of the simulation. This enables you to inspect
your results to see where the maximum penetration depth occurred in your
geometry/geometries. You may hide one or more parts to view this clearly in the
modeling window.
Note: You may Fit the graphic area
in case the graphics are not visible in the modeling window.
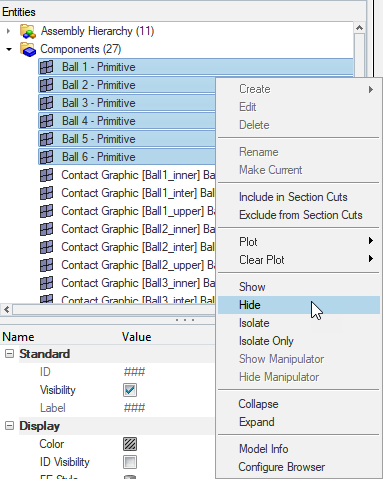
From the Results Browser select the components
Ball 1 – Primitive to Ball 6 –
Primitive.
Right-click and then click Hide in the context menu.
Figure 14.
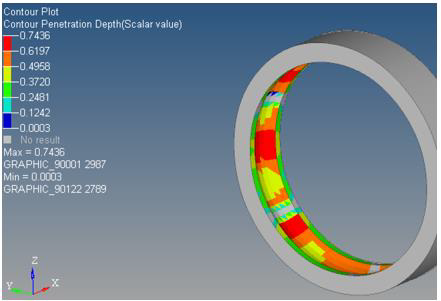
Hide the Rim graphic and the Inner Race graphic
in order to visualize the contours of the Outer Race graphic.
Figure 15.
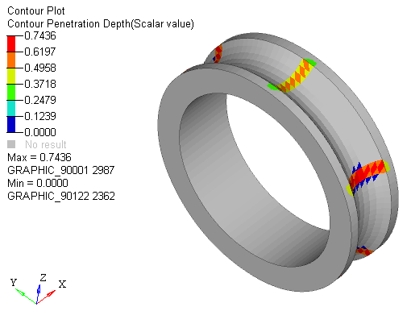
View the Animation - Penetration Depth.
Navigate to the next page , which shows a transient animation of the
penetration depth.
You can visualize the contours individually on the components by
isolating the components. To visualize the contours on the Inner Race
graphic, select the component in the Results Browser
browser, right-click and select Isolate from the
context menu.
Click on the Start/Pause Animation button to view the animation.
Figure 16.
Navigate to the next page .
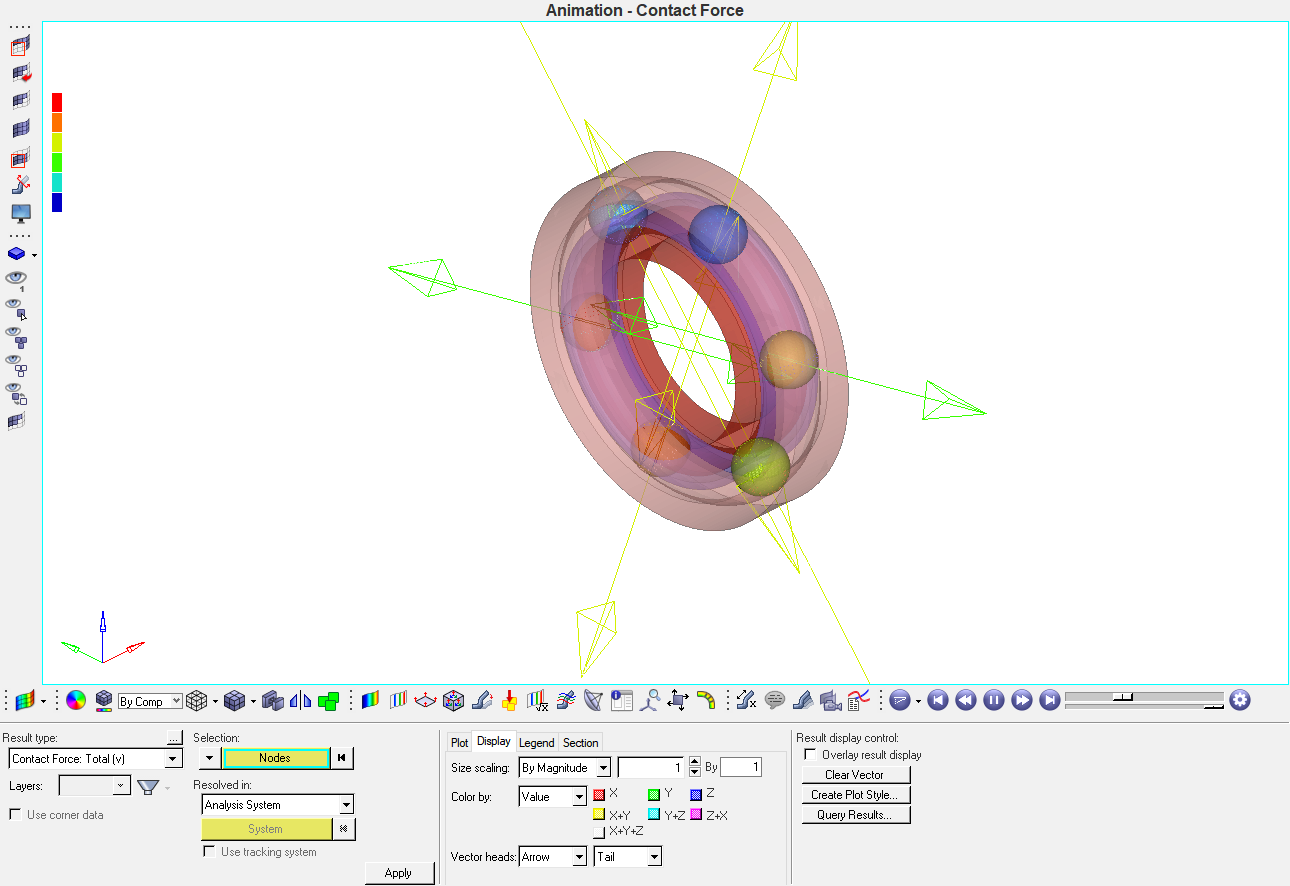
Visualize the Contact forces via force vectors.
Fit the model in the modeling window.
From the toolbar options, select Transparent Element and
Feature Lines.
Figure 17.
Click the (Vector) icon.
Activate the Display tab and change the Size
Scaling option to By Magnitude and use a value of
1.
Click the Start/Pause Animation button to view the
animation.
Figure 18. Animating the total contact force (the outer race graphic is
turned off for better visualization)
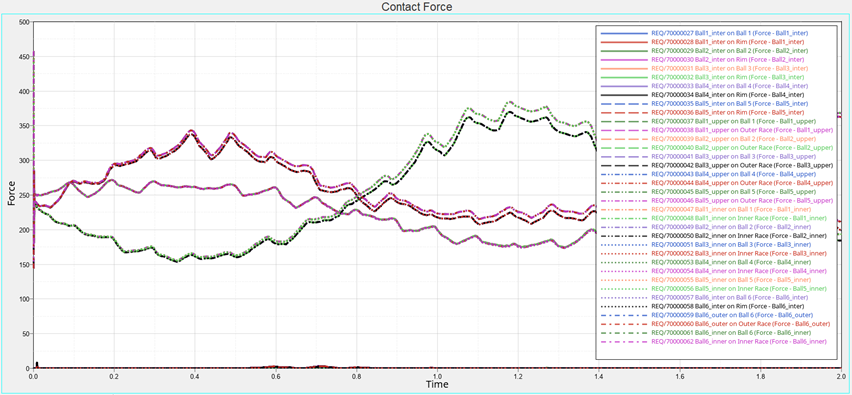
Plot Contact Forces.
Go to the next page , which has a HyperGraph plot of all the contact force
magnitudes.
Figure 19. Each time a new contact entity is created in MotionView, a corresponding output force request is
created that can be used to plot the contact forces between the geometries
specified in the contact entity.
Note: You may turn off curves from the Plot Browser to look at individual force plots.
Compare the Run Time with a Model Containing Meshed Spheres
In this step you will compare the run time of the model with different
bearings.
The semi-analytical (and fully analytical) contact method is more efficient than
the 3D mesh-mesh based contact. To illustrate this, you can run the same model you just
created however instead of using primitive spheres for the bearings, use a meshed
representation. Such a model is already available in your product
installation.
Copy the model Ball_Bearing_meshed.mdl, located in the
mbd_modeling\contacts folder, to your working
directory. Run this model from MotionView and
compare the analysis time to see the speedup.
As an example, a comparison between the run times for the two models is listed
in Table 4. Also listed
are the machine specifications that were used to generate this data.
Table 4.
Model
Ball_Bearing.mdl
Ball_Bearing_meshed.mdl
Contact Type
Semi-analytical
Mesh-Mesh
Number of processors used for
solution
1
1
Core Analysis Time (seconds)
177.4s
1342s
Total Elapsed Time (seconds)
180.4s
1344s
CPU Speed
2.4GHz
2.4GHz
Available RAM
57,784 MB
57,759 MB
CPU Type
Intel Xeon E5-2620
Intel Xeon E5-2620
Platform
Windows 7
Windows 7
As can be seen, for this model, a speedup of ~7x
(1344/180.4) is achieved.
Summary
In this tutorial, you learned how to
setup semi-analytical contact between a primitive spherical geometry and a meshed
geometry. Further, you were able to inspect the geometry to make sure the surface
normals were correct and there were no open edges or T connections
You were
also able to setup a transient analysis to calculate the contact forces between
these geometries and post-process the results via vector and contour plots, in
addition to plotting the contact force requests.
Finally, you were able to
compare the analysis time between a fully meshed representation of the spheres and
the model that you created. A significant speedup was observed which makes the
semi-analytical contact method the first choice for solving 3D contact models when
applicable.



 (Run) button.
(Run) button.



 Page Navigation buttons (located at the upper right
corner of the window, below the menu bar and above the graphics area) to view
these pages.
Page Navigation buttons (located at the upper right
corner of the window, below the menu bar and above the graphics area) to view
these pages.
 to view the animation.
to view the animation.
 (Vector) icon.
(Vector) icon.