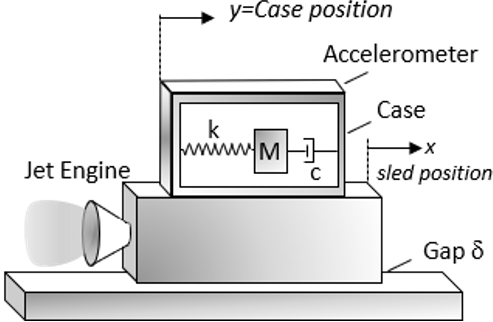
A mechanical accelerometer is used to measure the acceleration of a rocket test sled.
It contains a linear spring-damper system. See the image below. By tuning the
stiffness and damping, the accelerometer can be designed to estimate the
acceleration it feels within an acceptable time.
Figure 1 .
Objective
We can compute the deviation of any system response
x
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=Hhaaaa@331E@
x
*
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=HhapaWaaW
baaSqabeaapeGaa8Nkaaaaaaa@3415@
The problem is formulated as:
m i n (
x −
x
*
)
2
|
s t e a d y s t a t e
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaqaaaaaaaaaWdbiaah2gacaWHPbGaaC
OBaiaacckacaGGGcGaaiiOaiaacckacaGGOaWaaqGaa8aabaacbiWd
biaa=HhacqGHsislcaWF4bWdamaaCaaaleqabaacbaWdbiaa+Pcaaa
GccaGGPaWdamaaCaaaleqabaWdbiaaikdaaaaakiaawIa7a8aadaWg
aaWcbaWdbiaa=nhacaWF0bGaa8xzaiaa=fgacaWFKbGaa8xEaiaa+b
kacaWFZbGaa8hDaiaa=fgacaWF0bGaa8xzaaWdaeqaaaaa@4D4C@
s u c h t h a t f (
x
) < 1 e − 3
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaqaaaaaaaaaWdbiaadohacaWG1bGaam
4yaiaadIgacaGGGcGaamiDaiaadIgacaWGHbGaamiDaGqaaiaa=bka
caWFGcGaa8hOaiaa=bkaieGacaGFMbWaaeWaa8aabaWdbiaa+Hhaai
aawIcacaGLPaaacqGH8aapcaaIXaGaa4xzaiabgkHiTiaaiodaaaa@4736@
Design Variables
The stiffness of the spring,
k
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=Tgaaaa@3311@
c
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=ngaaaa@3309@
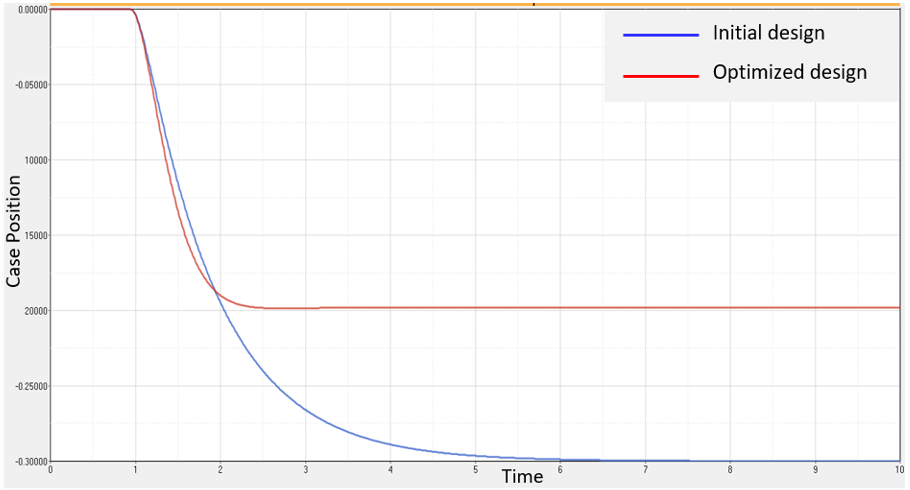
Results
By properly selecting the spring stiffness and damping, the
accelerometer can be designed to respond in the desired time frame.
Figure 2 .