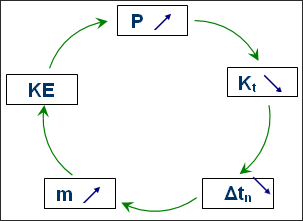
The use of mass scaling (/DT/NODA/CST) may lead to a mass instability. As a
node penetrates, its global stiffness increases (the instantaneous interface
stiffness, Kt is added); therefore,
its nodal time step decreases. In order to match the minimum time step, Radioss adds the needed mass to the node. Unfortunately, this
added mass increases the kinetic energy and the penetration gets bigger. Figure 1. Effect of Mass Scaling on Interface TYPE7
Unless the interface is able to stop the penetration, the added mass (due to mass scaling) will
keep on getting bigger and bigger. Therefore, the computation is likely to stop,
since the mass variation may get huge very quickly (few cycles). If this is the
case, the interface should be modified:
Gap should be increased
Initial stiffness can be increased
Mesh should be modified to be refined and uniform in the contact zone