Interfaces TYPE3 and TYPE5 have some common problems.
Energy jumps
Bad contact treatment
Limited search algorithm
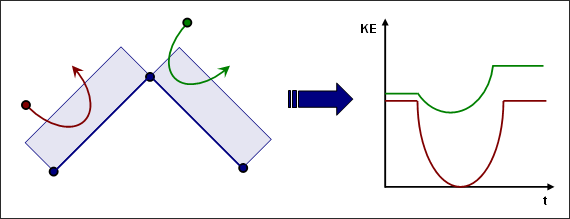
Energy Jumps
The gap used in interface TYPE5 (and TYPE3) is one sided and does not take into account the
edges. This can lead to energy jumps in cases of a large gap (Figure 1). Figure 1. Jump in Energy
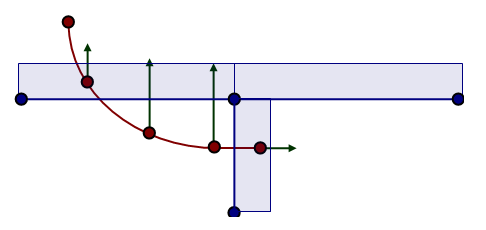
Bad Contact Treatment
Moreover, as the interface stiffness is constant, node penetration is allowed. This point can
lead to a huge error, especially if sliding occurs during the penetration. Figure 2 illustrates
how secondary nodes are allowed to go through the shell mid-surface because of bad
contact treatment. Figure 2. Bad Contact Treatment
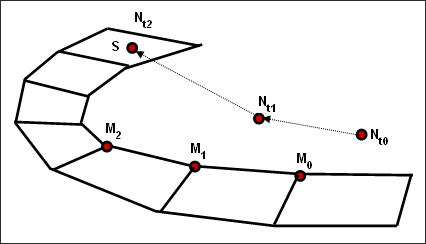
Limited Search Algorithm
With interface TYPE5 (and TYPE3), the detection of the closest main node is limited to the
segments topologically close to the previous one (topologically limited search
algorithm). The first search is done by Radioss Starter
to determine the closest initial main node, then the Engine determines the closest
main node, taking into account only the segments topologically close to the previous
one. This method is rather slow in CPU time, and it does not work very well,
especially if high curvatures are involved (Figure 3). Figure 3. Bad Detection of the Closest Main Segment