
/GJOINT
Block Format Keyword Defines complex (gear-type) joints. This keyword is not available for SPMD computation.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /GJOINT/type/joint_ID/unit_ID | |||||||||
| joint_title | |||||||||
| node_ID0 | FscaleV | Mass | Inertia | node_ID1 | node_ID2 | node_ID3 | |||
| Mass1 | Inertia1 | r1x | r1y | r1z | |||||
| Mass2 | Inertia2 | r2x | r2y | r2z | |||||
| Mass3 | Inertia3 | r3x | r3y | r3z | |||||
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| type | Input type. (see table below for available keywords) |
|
| joint_ID | Gear type joint
identifier. (Integer, maximum 10 digits) |
|
| unit_ID | Unit identifier. (Integer, maximum 10 digits) |
|
| joint_title | Gear type joint
title. (Character, maximum 100 characters) |
|
| node_ID0 | Primary node. identifier
(position node). (Integer) |
|
| FscaleV | Velocity scale
factor. Default = 1.0 (Real) |
|
| Mass | Added mass to primary
node. Default = 0.0 (Real) |
|
| Inertia | Added to primary node
inertia. Default = 0.0 (Real) |
|
| node_ID1 | Node identifier N1. (Integer) |
|
| node_ID2 | Node identifier N2. (Integer) |
|
| node_ID3 | Node identifier N3 - only necessary for differential gear
joint. (Integer) |
|
| Mass1 | Added mass to node_ID1. Default = 0.0 (Real) |
|
| Inertia1 | Added to node_ID1 inertia. Default = 0.0 (Real) |
] |
| r1x | Local axis X
component. Default = 1.0 (Real) |
|
| r1y | Local axis Y
component. Default = 0.0 (Real) |
|
| r1z | Local axis Z
component. Default = 0.0 (Real) |
|
| Mass2 | Added mass to node_ID2. Default = 0.0 (Real) |
|
| Inertia | Added to node_ID2 inertia. Default = 0.0 (Real) |
] |
| r2x | Local axis X
component. Default = 1.0 (Real) |
|
| r2y | Local axis Y
component. Default = 0.0 (Real) |
|
| r2z | Local axis Z
component. Default = 0.0 (Real) |
|
| Mass3 | Added mass to node_ID3. Default = 0.0 (Real) |
|
| Inertia3 | Added to node_ID3 inertia. Default = 0.0 (Real) |
] |
| r3x | Local axis X
component. Default = 1.0 (Real) |
|
| r3y | Local axis Y
component. Default = 0.0 (Real) |
|
| r3z | Local axis Z
component. Default = 0.0 (Real) |
Complex Joint Types
- Type
- Description
- GEAR
- ∞ rotational gear
- DIFF
- ∞ differential gear
- RACK
- ∞ rack and pinion
Comments
- Complex (gear-type) joints belong to
the family of kinematic constraints treated by a Lagrange multipliers' method. A
joint position is defined by a central node_ID0,
which are connected to two or three secondary nodes. Mass and inertia must be
added to all nodes. It is advisable to place the primary node in the mass center
of the joint. Kinematic constraints impose relations between secondary nodes
velocities.
Figure 1. 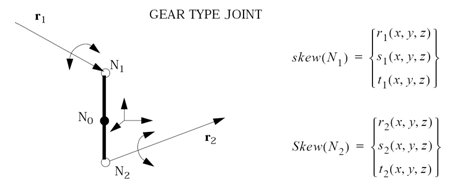
- Translational velocities of gear joint
nodes are constrained by a rigid link relation. For the rotational DOF, a scale
factor is imposed between velocities of node_ID1 and node_ID2, measured in their local coordinates. The
corresponding constraint equations are:Where, and are relative rotational velocities of node_ID1 and node_ID2 with respect to the rigid body rotational velocity.
Figure 2. 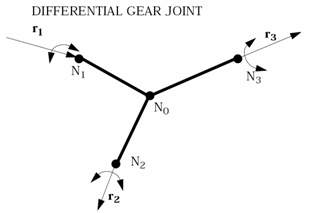
- The rotational velocities of a
differential gear joint are constrained by the relations:
Figure 3. 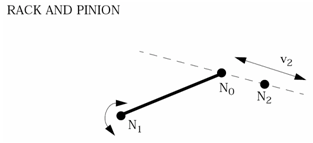
- The rack and pinion joint allows the
rotational velocity of node_ID1 to be transformed to a translational
velocity of node_ID2. The constraint equations for these
velocities are:
- The node_ID3 is only necessary for a differential gear joint.
- This option is not available, if it is
applied on:
- a node with a null mass
- a node with a null inertia (except in case of node_ID2 of a rack type GJOINT)