OS-V: 0820 Marlow Hyperelastic with Viscoelasticity Material
Model
The combination of hyperelastic material models with viscoelasticity allows you to
model the strain rate dependent large strain response.
The Marlow model differs from most hyperelastic models in that it does not use a
small number of model parameters, but a scalar function to define the mechanical
properties. It can be defined conveniently by providing the stress–stretch (stretch
= engineering strain + 1) curve without needs for parameter calibration. The
coupling of the Marlow model and viscoelasticity is an approach to create a strain
rate-dependent hyperelastic model which has good accuracy and is convenient to use.
In this combination, the Marlow model requires to specify the stress–stretch curve
for the instantaneous or long-term material response, while experimental data can be
obtained only at finite strain rates.
Model Files
Before you begin, copy the file(s) used in this problem
to your working directory.
The single CHEXA8 element model has an edge length of 1.0 mm. The
Marlow model is derived from experimental data only using a single set of data. The
test data in the form of uniaxial tension, uniaxial compression, equi-biaxial, or
planar test is used. Deviatoric behavior depends on the 1st stretch invariant only
and it is independent of the 2nd invariant.
Materials
The property materials used for the Marlow model are:
Property Material
Values
Density
1 x 10-9 tonnes/mm3
Poisson's ratio
0.499
MATHE Tension
Hyperelastic material models describe the nonlinear elastic behavior by formulating
the strain energy density as a function of the deformation state. This elastic
potential is expressed as a function of either the strain invariants (, , ) or the principal stretches (, , ). Generally, hyperelastic model can be specified
either with material constant or experimental data.
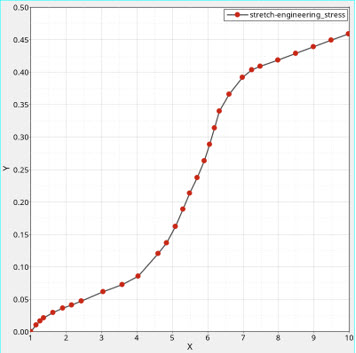
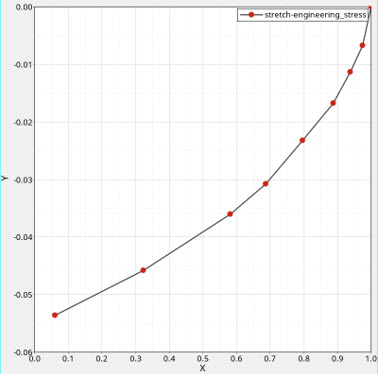
For Marlow model, only experimental data in table format can be specified, as shown
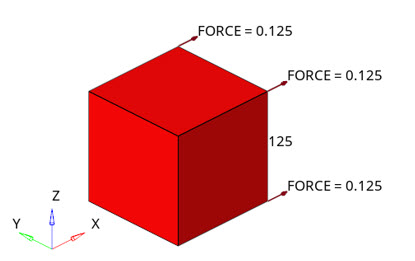
in Figure 3.Figure 2. CHEXA element model with applied tensile forces Figure 3. Experimental uniaxial tensile stress-stretch curve
Tensile input data covers engineering stress up to 0.46 MPa and since the design load
corresponds to nominal stress of 0.5 MPa, extrapolation is used at the end of the
NLSTAT LGDISP load step.
Marlow’s model uses scalar functions instead of scalar parameters to define the
material behavior. The model assumes that the strain energy density is independent
of the second deviatoric strain invariant and can be decomposed into a deviatoric
and a volumetric part. The volumetric part becomes relevant in confined
compression.
In case of incompressible deformation, the elastic potential is essentially defined
by a single scalar function . This function is uniquely determined by the
stress–strain response measured in a single test, for example, a uniaxial tensile
test. MATHEs can be compressible or nearly incompressible,
specify nu or D1 to have constant volumetric response throughout the deformation.Figure 4. Poisson’s ratio, and density of material and reference to
the table
Results
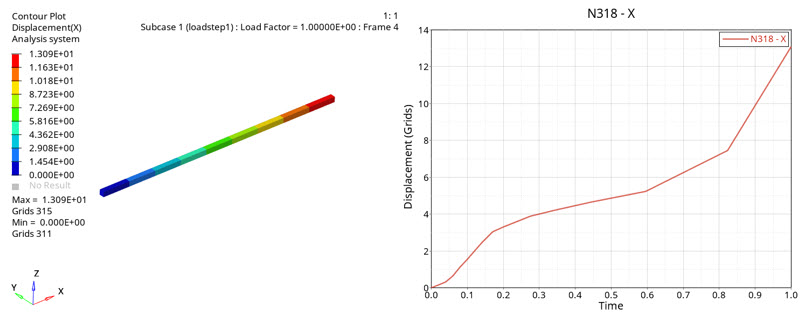
The peak deformation in uniaxial tensile test of hyperelastic material with
CHEXA element is 13.09 mm.Figure 5. Deformation of CHEXA element due to tensile forces
MATHE Compression
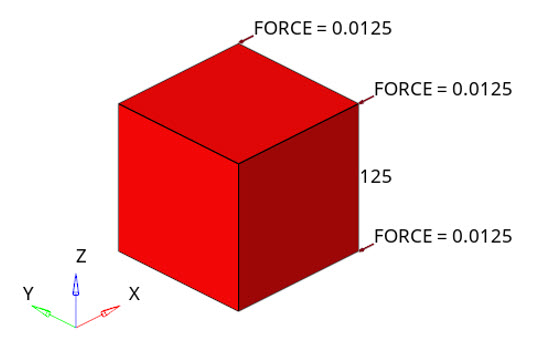
Figure 6. CHEXA element model with compressive forces
The nominal compressive stress of 0.05 MPa is applied with forces. The model is
simply supported.
The volumetric part is considered. Since free lateral expansion is
allowed, it has less significance. The volumetric part of the potential of a
compressible model can be derived from a stress–strain curve of hydrostatic
compression tests. This is defined in TABD where volumetric ratio
is specified as a function of pressure. Once has been determined, can be obtained from standard compression test
considering the volumetric behavior. This approach enables a user-friendly
implementation of the Marlow model. You will define the deviatoric and volumetric
behavior in tabular form: the test data of a uniaxial, biaxial, or planar test; and
for compressible models, additionally, the test data of a volumetric test. In these
examples TABD is not used; instead, Poisson’s ratio is specified.
Deformation level independent volumetric behavior is internally derived from the
initial shear stiffness (TAB1) and Poisson’s ratio.Figure 7. Experimental compressive stress-stretch curve
In compression, stretch can be defined as and the deformation of the model stays in the
specified range.
Results
Hyperelastic Marlow model of CHEXA element shows peak displacement
of 0.8185 mm in x-direction.Figure 8. Deformation of CHEXA element due to compression
forces
MATTHE
MATTHE is used to define temperature dependent hyperelastic
materials. MATTHE is supported in implicit LGDISP analysis.
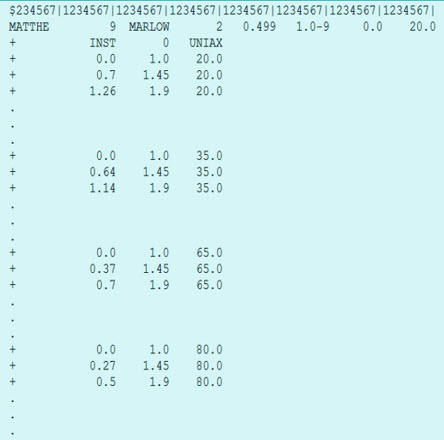
Experimental engineering stress-stretch data at each temperature is presented in
tabular format in ascending order.Figure 9. Experimental stress-stretch curve at each
temperature Figure 10. Specify the MATTHE Marlow material model
While defining Marlow material model in OptiStruct, when
volumetric behavior is temperature independent, the 1st column corresponds to
nominal stress, 2nd to stretch and 3rd to temperature. In this case, either
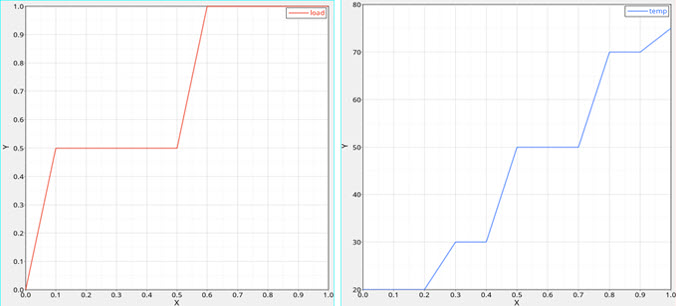
nu (or D1) defines the constant volumetric response throughout the deformation.Figure 11. Mechanical load (left) and Thermal load (right) applied
on CHEXA element
The example model contains two TLOAD1s that define mechanical and
thermal load profiles that evolve in different phases and those are combined with
DLOAD.
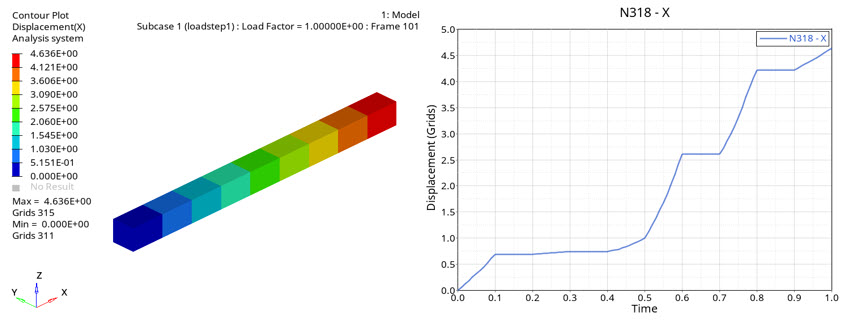
Results
Hyperelastic MATTHE Marlow model of CHEXA
element shows peak displacement of 4.636 mm in x-direction.Figure 12. Deformation of CHEXA element. displacement in loading direction
MATHE+VE
A combination of the hyperelastic Marlow model with viscoelasticity provides the
capability to describe the strain-rate-dependent material behavior while preserving
the advantages of Marlow’s approach, the convenient definition using test data
directly and the exact modeling of the test data. Viscoelastic models allow to
describe relaxation and strain-rate-dependent elastic properties.
Considering a shear deformation, an integral formulation of linear small strain
viscoelasticity is given by:
Where,
Shear stress
Shear strain
Relaxation function
This can be expressed using the instantaneous shear modulus and a relative relaxation function by:
Usually, the relaxation function is expressed by a Prony series containing relaxation times and coefficients as parameters.
The Prony series parameters can be obtained from a relaxation test, where a constant
strain is applied instantly and the relaxation of the stress over time is measured.
A straightforward evaluation of this test is to interpret the normalized stress over
time as the normalized relaxation function and to fit it using the Prony series.
This approach assumes that the decrease of the normalized stress over time is not
significantly influenced by the nonlinearity of the hyperelastic part of the
material model.
Table 1. Prony series parameters and bulk modulus of the
example
in s
in s
in s
in s
in s
K of GPa
0.3539
0.08124
0.07458
1.692
0.05052
35.23
0.04117
733.5
0.04575
15275
2.5
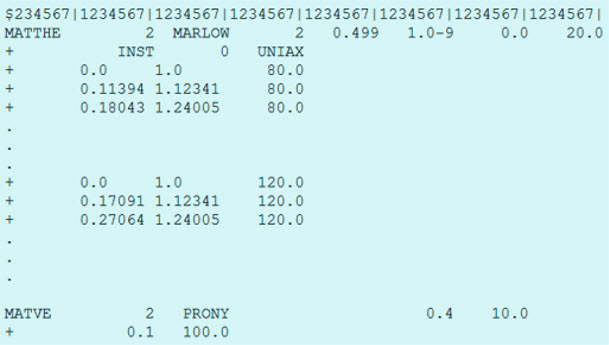
When viscoelasticity is considered, moduli temporal property needs to be specified in
the continuation line of MATHE card. By default, this is
considered as long-term relaxed input. The other options are to specify it as
instantaneous input. MATVE card has the same ID as
MATHE.Figure 13. MATHE + MATVE card specification with same ID for
visco-hyperelastic model
According to the definition of the visco-hyperelastic model, it requires to specify
the parameters of the Prony series as well as to specify the temporal (here
instantaneous) hyperelastic response by the potential U0. It is the
response that the model shows on a timescale much smaller than the lowest considered
relaxation time. This timescale lies outside the validity range of the model, so
U0 does not have the physical meaning of the high frequency limit of
the real material behavior. Nevertheless, U0 must be identified from
experimental data to specify the model. It is basically a transformation from a
uniaxial stress–strain curve at constant strain rate to the curve describing the
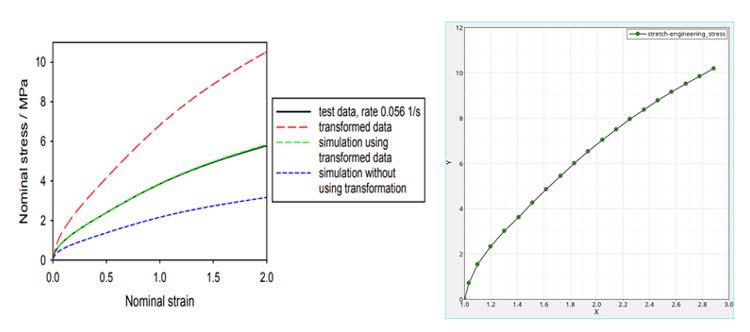
instantaneous hyperelastic response.Figure 14. Instantaneous stress-strain curve (left) and the
corresponding stress-stretch curve for the MATHE card (right)
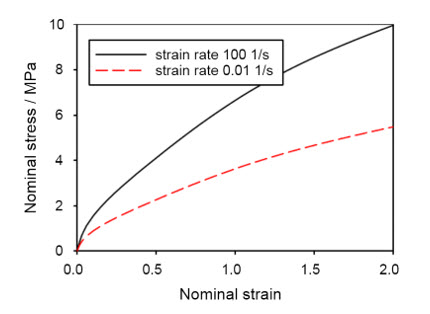
The red dashed curve is the instantaneous stress–strain curve of the viscoelastic
Marlow model. The example model takes the stress-stretch data as instantaneous
definition for MATHE and uses Prony series to define viscoelastic
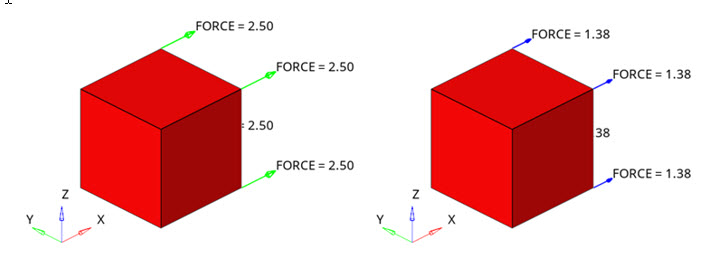
behavior.Figure 15. Two loadsteps with different loads and loading
rates
Single element model is uniaxially loaded from zero to nominal stress. First loadstep
having 10.0 MPa of nominal stress ramped within 0.02s (left) and second loadstep
with 5.5 MPa of nominal stress ramped within 200s (right).
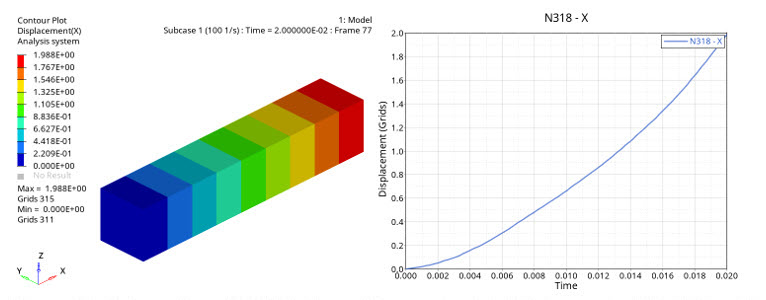
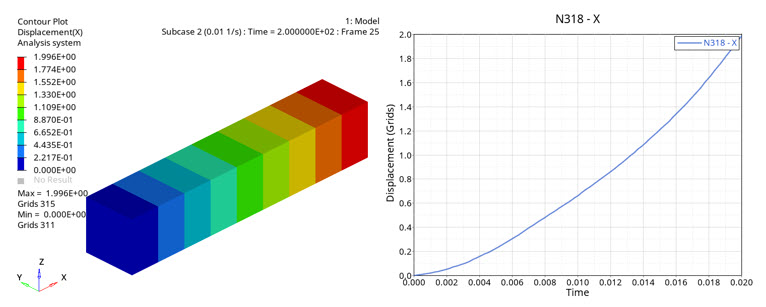
Results
Both load steps return the same displacement of 2 mm at the end of the nonlinear
transient analysis. Nominal strain matches with reference result.Figure 16. Deformation of CHEXA element from unloaded state to
nominal 10.0 MPa within 0.02s Figure 17. Deformation of CHEXA element from unloaded state to
nominal 5.5 MPa within 200s Figure 18. Reference results
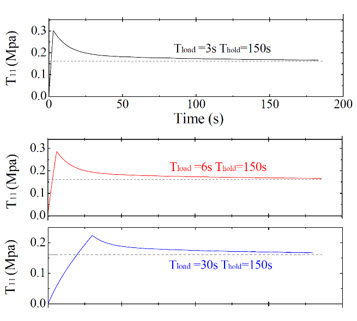
MATTHE+VE
The model contains three cubes represented with CTETRA,
CPENTA and CHEXA elements. Models are
loaded with different strain rates up to 30% deformation level and then hold so that
the total analysis time in nonlinear transient is 147s. Analysis environment is
T=100°C and input data is given at T=80°C and T=120°C, respectively.Figure 19. CTETRA, CPENTA and CHEXA model elements
Temperature dependent Marlow model with viscoelasticity combines previously described
material definitions. Temperature dependent MATTHE is defined in
tabular format. Rate-dependency described in MATVE is common for
all environments.Figure 20. Temperature dependent MATTHE Marlow model
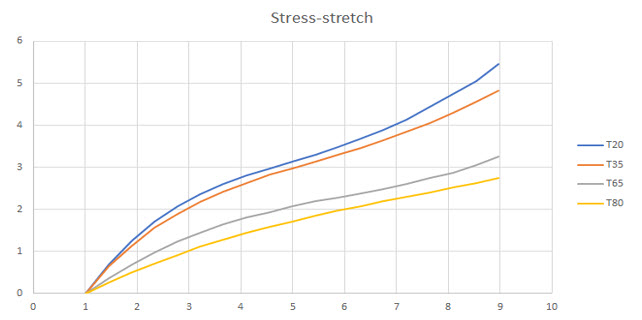
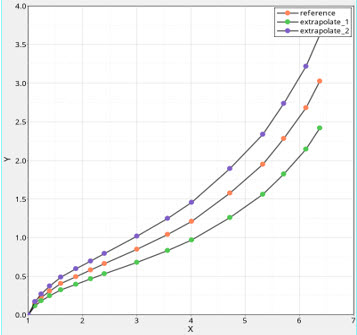
The example models take the widely referred Treloar’s stress-stretch data as
reference and this is considered to return the baseline solution at T=100°C. Stress
values are multiplied by factors 0.8 and 1.2 to obtain stress-stretch data at two
extrapolated environments.Figure 21. Stress-stretch data of the material Figure 22. Reference result with 3s, 6s and 30s Tload
The uniaxial tension data at the two extrapolated environments is used as the input
data.
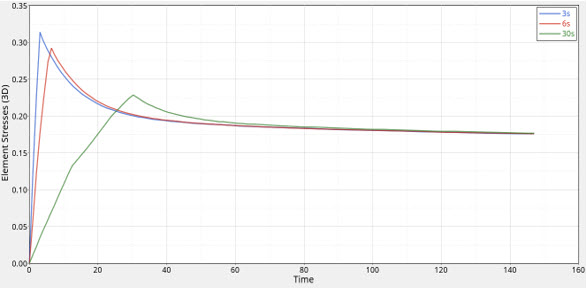
Results
MATTHE with MARLOW + VE returns a
good match for stress relaxation against the published results. In the reference
study OGDEN MATHE was used (single environment). OptiStruct MATHE(OGDEN) +VE perfectly matches the simulation
results shown in the reference.Figure 23. Elemental stresses with 3s, 6s, and 30s Tload
1 Transformation
of Test Data for the Specification of a Viscoelastic Marlow Model. Olaf Hesebeck,
Fraunhofer Institute for Manufacturing Technology and Advanced Materials IFAM,
Wiener Straße 12, 28359 Bremen, Germany.
2 Parameter Identification
Methods for Hyperelastic and Hyper-Viscoelastic Models. Yifeng Wu, Hao Wang, and
Aiqun Li. School of Civil Engineering, Southeast University, Nanjing 210096, China,
Beijing University of Civil Engineering and Architecture, Beijing 100044,
China