
Problem 8: Kinematic Analysis of a Spatial Linkage Mechanism
Objective
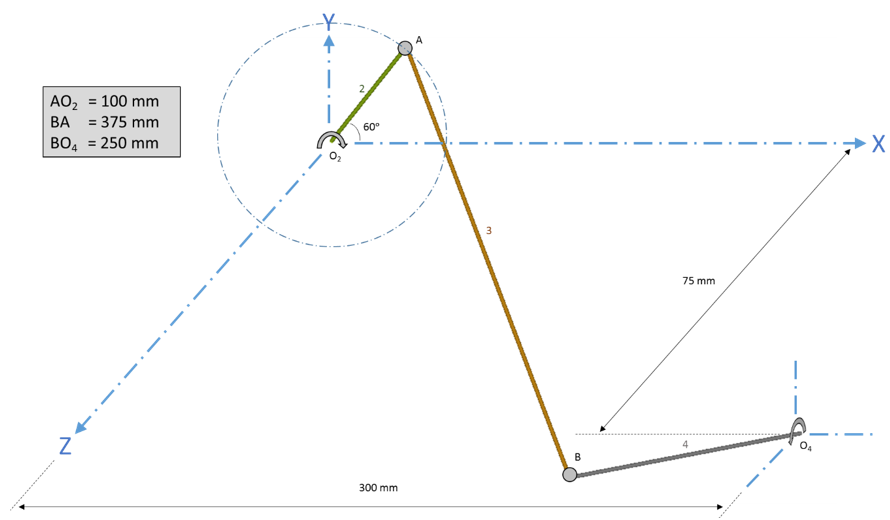
In the mechanism shown below, the angular velocity of the link 2 is 40 rad/s about the Z axis and is constant. Find the angular velocity of point B in the position shown.
Entities Validated
- Rigid body
- Motion joint - rotational
- Revolute joint
- Ball joint
Type of Analysis
- Kinematic
Reference
Theory of Machines and Mechanisms: SI Edition, Third Edition International version, by John J. Uicker, JR, Gordon R. Pennock and Joseph E. Shigley (2009): 365 (ISBN 13:978-0-19-806232-5)
Model Files
- spatial_linkages_kinematics.mdl - MotionView Model
- spatial_linkages_kinematics.xml - MotionSolve Deck
Graphical Results
Result Comparison
| Output | Analytical | MotionSolve | % Error |
|---|---|---|---|
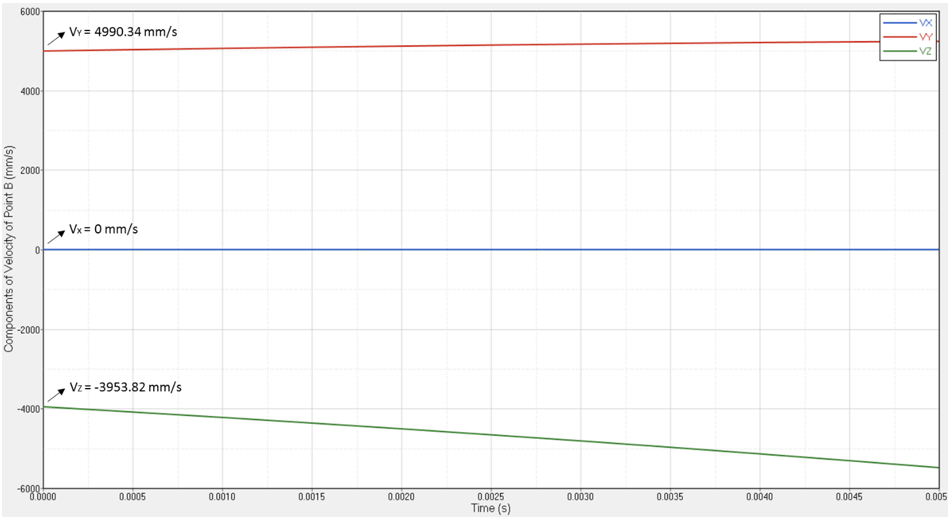
| X component of velocity of Point B, (mm/s) | 0 | 0 | 0 % |
| Y component of velocity of Point B, (mm/s) | 4990.53 | 4990.34 | 0.004 % |
| Z component of velocity of Point B, (mm/s) | -3953.98 | -3953.82 | 0.004 % |
Conclusion
MotionSolve results compare well with analytical results.