
ARSM-Based Sequential Optimization and Reliability Assessment (SORA_ARSM)
Reliability and robustness based optimization methods require many design evaluations, therefore improving their efficiency is one of the issues. ARSM-Based Sequential Optimization and Reliability Assessment attempts to address this issue by using Adaptive Response Surface Method (ARSM).
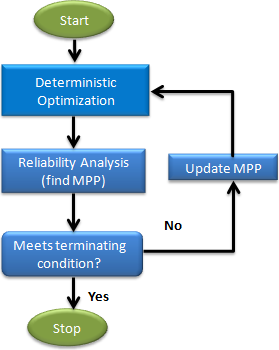
In this process, response surfaces are created and an optimization is carried out on the surfaces. During deterministic optimization and reliability analysis, response surfaces are adaptively updated for increased accuracy.
Usability Characteristics
- ARSM-Based Sequential Optimization and Reliability Assessment is the most efficient of the three RBDO methods available in HyperStudy, but it is also the least accurate.
- An extension of ARSM-Based Sequential Optimization and Reliability Assessment is implemented in HyperStudy to allow for robust design optimization. Robust design optimization attempts to minimize the objective variance in order to reduce its sensitivity to design variations and consequently increase the design's robustness. The implementation in HyperStudy is based on the use of percentiles for the objective function and is turned on via the Robust Optimization setting in the Specification step.
- ARSM-Based Sequential Optimization and Reliability Assessment terminates if one of the conditions are
met.
- One of the three convergence criteria are met.
- The absolute objective change is less than a convergence tolerance value (Termination Criteria) and there is no constraint violation (Constraint Violation Tol. (%)) in the last design.
- The relative objective change is less than a convergence tolerance value (Termination Criteria) and there is no constraint violation (Constraint Violation Tol. (%)) in the last design.
- The absolute change and relative change of each input variable (Termination Criteria) is less than a convergence tolerance value. Also, there is no constraint violation (Constraint Violation Tol. (%)) in the last design.
- The maximum number of allowable iterations (Maximum Iterations) is reached.
- One of the three convergence criteria are met.
- The reliability analysis is carried out by searching for the most probable point (MPP). Issues such as non-uniqueness of the MPP and highly non-linear output response functions can reduce the accuracy of the reliability calculation.
- The algorithm begins with N+1 evaluations, where N is the number of design variables. Evaluations in subsequent iterations are generated sequentially.
Settings
| Parameter | Default | Range | Description |
|---|---|---|---|
| Maximum Iterations | 25 | > 0 | Maximum number of iterations allowed. |
| Angle Convergence Tol. | 0.25 | > 0.0 |
Angle convergence tolerance
for inverse MPP search, in unit of degrees. If the angle between the
vector of
(design point in standard normal
distribution space) and the negative gradient falls within the
tolerance, then inverse MPP search is regarded as converged.
Tip: A smaller value favors a higher precision of reliability
analysis, but more computational effort is needed. |
| Robust Optimization | No | No or Yes |
Defines whether this is a
robust optimization or not.
|
| Robust Min % | 95.0 |
|
Defines the percentile value of robust optimization for minimization objective. |
| Robust Max % | 5.0 |
|
Defines the percentile value of robust optimization for maximization objective. |
| On Failed Evaluation | Terminate optimization |
|
|
| Parameter | Default | Range | Description |
|---|---|---|---|
| Termination Criteria | 1.0e-4 | > 0.0 | If the absolute or relative change of the objective value is
less than this value, or the absolute or relative change of the
input variables is less than this value, and the constraint
violation is not larger than this value, then ARSM-Based Sequential Optimization and Reliability Assessment will be terminated. Also, there
must not be any constraints with an allowable violation that has
been exceeded in the last design. An exception is when the absolute change and relative change of each input variable is less than this value in the last two consecutive designs or when we have found feasible designs and the best feasible design has not been improved during the last two consecutive iterations, ARSM-Based Sequential Optimization and Reliability Assessment will be terminated. See Equation 1. Where, is the input variable; is the objective; is the number of input variables; is the current iteration number; is the maximum constraint violation; is the allowable constraint violation; is the value of the termination criteria. See Equation 2. |
| Move Limit Fraction | 0.1 |
|
Move limit fraction. Smaller values allow more steady convergence (smaller fluctuation of the output response values), but more computational effort could be consumed. The value will be adaptively updated during the optimization process. |
| Initial Linear Move | By DV Initial |
|
LB, UB: Lower and upper bounds on input variable. |
| Minimal Move Factor | 0.1 | 0.0 < Minimal Move Factor < Move Limit Fraction | Minimal move factor. See the usage of Minimal Move Factor in Initial Linear Move. |
| Initial Input Perturbation | 1.1 | ≠ 0.0 | Initial input variable perturbation value. Larger values result in a wider spread of the initial designs ( is the number of input variables; the designs together with the start design can determine a linear response surface). Adaptive Response Surface Method will search the design space more widely. |
| Use SVD | No | No or Yes |
|
| Revision | A | A or B | Used to help when there is a convergence difficulty. By default, "A" is selected meaning the legacy algorithm. |