Since version 2026, Flux 3D and Flux PEEC are no longer available.
Please use SimLab to create a new 3D project or to import an existing Flux 3D project.
Please use SimLab to create a new PEEC project (not possible to import an existing Flux PEEC project).
/!\ Documentation updates are in progress – some mentions of 3D may still appear.
3D example: Translating motion (Tutorial)
Foreword
This paragraph is a summary of cases, treated in detail in the technical document: " 3D Translating Motion Tutorial ".
The files relating to the studied cases, are accessible via the supervisor, Open Example context.
Study carried out
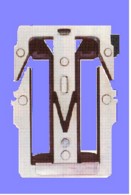
The study proposed in the 3D tutorial " Translating Motion " is the study of a contactor Schneider Electric (trident-shaped) that serves as an interrupter to start an electric motor.
Studied device
The studied device, represented on the figure below, includes the following elements:
- a magnetic circuit made up of two ferromagnetic parts (laminated) in the shape of trident:
- a fixed part (lower grip)
- a moving part (upper grip) assembled on springs
- a coil, surrounding the central tooth, supplied by a 24-volt power supply
Operation
The operation of this device is as follows:
The coil produces the magnetic flux necessary for the attraction of the moving part of magnetic circuit.
The different phases of the process are as follows:
- the coil is supplied (voltage source)
- under the effect of the magnetic force, the upper part moves to make contact with the lower one; then the interrupt is on
Treated cases
The simulations (described in the 3D Tutorial) are carried out in Flux by means of the study of two cases:
- case 1: study with the multi-static model (different linear positions)
- case 2: study with the coupled load model (with circuit coupling)
Case 1
The first case is a study with the multi-static model (Magneto Static application):
In this first case ( multi-static model ), the moving part of the device can take various positions (fixed arbitrarily).
One is interested in the computation of the magnetic field for arbitrarily chosen positions of the mobile grip.
With this model it is possible to evaluate the force acting on the fixed grip at different positions.
Case 2
The second case is a parametric study with the coupled load model (Transient Magnetic application):
In this second case ( coupled load model ), a resistant force is exerted on the moving part of the device (by the intermediary of a system of return springs). The coil is supplied (voltage source) by the intermediary of an external electric circuit.
The advantage of this model is to study the time variation of the position and speed of the mobile grip and the time variation of the electromagnetic force acting on the mobile grip.