Model - Motor - Maps
Positioning and objective
The aim of the test “Characterization - Model - Motor - Maps” is to give maps along the three dimensions, If-Jd-Jq, for characterizing the 3-Phase synchronous machines with wound field.
These maps allow for predicting the behavior of the electrical rotating machine at a system level.
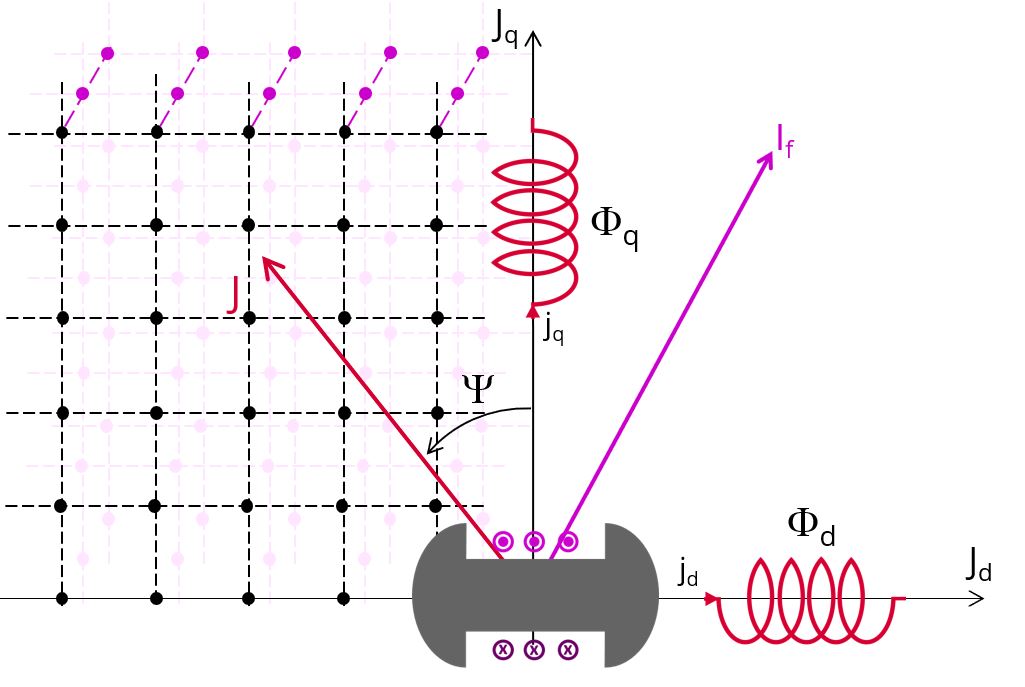 |
| “Characterization - Model - Motor - Maps” illustration. Example for a second quadrant calculus. |
The performance of the machine in steady state can be deduced from the results obtained in this test in association with the drive and control mode to be considered.
The following table helps to classify the test:
| Family | Characterization |
| Package | Model |
| Convention | Motor |
| Test | Maps |
| Positioning of the test "Characterization - Model - Motor - Maps" | |
User inputs
Maps are mainly function of the following user inputs: the maximum value of the field current, the maximum value of the line current, the speed, the number of quadrants to be considered, and the rotor position dependency.
Main outputs
est results are illustrated with data, graphs, and tables.
- Flux linkage
- D-axis flux-linkage Фd
- Q-axis flux-linkage Фq
- Flux linkage derivative (only when the rotor position dependency is
considered)
- D-axis flux-linkage derivative with respect to the rotor position Фd/dθr
- Q-axis flux-linkage derivative with respect to the rotor position Фq/dθr
- Inductance
- D-axis inductance (dynamic, cross dynamic and static)
- Q-axis inductance (dynamic, cross dynamic and static)
- Saliency
- Torque
- Electromagnetic torque Tem
- Losses
- Stator iron losses WironStator versus speed
- Rotor iron losses WironRotor versus speed (only when the rotor position dependency is considered)
- Total losses Wtotal versus speed
- Losses
- Joule losses WCus in stator winding
- Power electronics losses
- Field current flux and cross effect flux curve versus Jq
- Joule losses WCur in rotor winding versus field current
- Mechanical losses versus speed versus speed