Inputs
1. Introduction
The total number of user inputs is equal to 8. Among these inputs, 4 are standard inputs and 4 are advanced inputs.
2. Standard inputs
2.1 Current definition mode
There are 2 common ways to define the electrical current.
Electrical current can be defined by the current density in electric conductors.
In this case, the current definition mode should be « Density ».
Electrical current can be defined directly by indicating the value of the line current (the rms value is required).
In this case, the current definition mode should be « Current ».
2.2 Maximum line current, rms
When the choice of current definition mode is “ Current ”, the rms value of the maximum line current supplied to the machine: “Max. line current, rms” ( Maximum line current, rms value ) must be provided.
2.3 Maximum current density, rms
When the choice of current definition mode is “ Density ”, the rms value of the maximum current density in electric conductors “Max. current dens., rms” ( Maximum current density in conductors, rms value ) must be provided.
2.4 Command mode
Two commands are available: Maximum Torque Per Voltage (MTPV) and Maximum Torque Per Amps (MTPA) command mode.
For the base speed point computation, both commands lead to the same results. In fact, the base speed point corresponds to the working point which maximizes the mechanical torque at maximum current and at maximum voltage. Following this, MTPA and MTPV commands give the same results on this test.
2.5 Ripple torque analysis
The “ Ripple torque analysis ” (Additional analysis on ripple torque period: Yes / No) allows to compute or not to compute the value of the ripple torque and to display the corresponding torque versus the angular position over the corresponding ripple torque period.
The default value is “No”.
- This choice influences the accuracy of results and on the computation time. The peak-peak ripple torque is calculated. This additional computation needs addition computation time.
- In case of “Yes”, the ripple torque is computed. Then, the flux density in regions is evaluated through the ripple torque computation.
- In case of “No”, the ripple torque is not computed. Then, the flux density in regions is evaluated by considering one dedicated static computation (1 rotor position to be considered) for the computed working point.
2.6 Additional losses
3. Advanced inputs
3.1 Number of computations for control angle
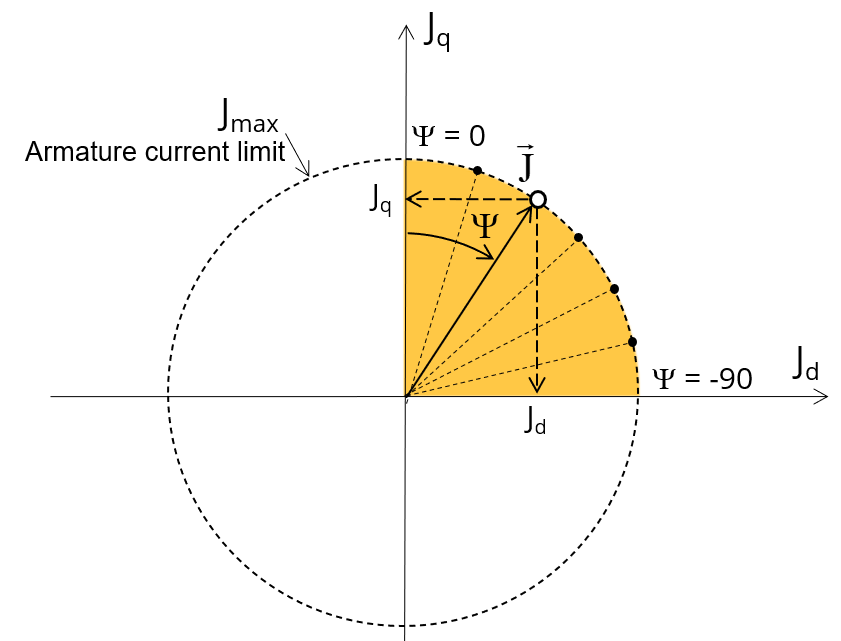
Considering the vector diagram shown below, the control angle Y is the angle between the Q-axis and the electrical current (J) (Y = (J q , J)).
The computation to get the corner point location is performed by considering control angle (Y) over a range of 0 to 90 electrical degrees. The user input “ No. comp. for ctrl. angle ” (Number of computations for the control angle) allows to choose between accuracy of results and computation time by using a number of computations between and . The variation area for is represented by the quarter circle (colored yellow in the diagram). This discretization is necessary to find the working point corresponding to the base speed point of the torque-speed curve.
The default value of Number of computations for the control angle is equal to 5. The minimum allowed value is 5.
 |
| Variation area for control angle Ψ |
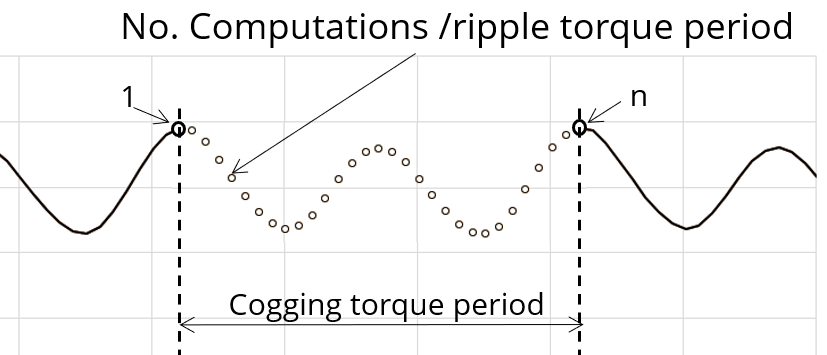
3.2 Number of computations per ripple torque period
The number of computations per ripple torque period is considered when the user chooses to perform a “Ripple torque analysis” (i.e. answered “Yes” to the standard input “Ripple torque analysis”.
The user input “ No. comp. / ripple period ” (Number of computations per ripple torque period) influences the accuracy of results (computation of the peak-peak ripple torque) and the computation time.
The default value is equal to 30. The minimum allowed value is 25. The default value provides a good compromise between the accuracy of results and computation time.
 |
| Definition of the number of computations per ripple torque period |
3.3 Skew model – Number of layers
When the rotor or the stator slots are skewed, the number of layers used in Flux Skew environment to model the machine can be modified: “Skew model - No. of layers” ( Number of layers for modelling the skewing in Flux Skew environment ).
3.4 Mesh order
To get the results, the original computation is performed using a Finite Element Modeling.
Two levels of meshing can be considered for this finite element calculation: first order and second order.
This parameter influences the accuracy of results and the computation time.
By default, second order mesh is used.
3.5 Airgap mesh coefficient
The advanced user input “ Airgap mesh coefficient ” is a coefficient which adjusts the size of mesh elements inside the airgap. When the value of “Airgap mesh coefficient” decreases, the mesh elements get smaller, leading to a higher mesh density inside the airgap, increasing the computation accuracy.
The imposed Mesh Point (size of mesh elements touching points of the geometry) is described with the following parameters:
- MeshPoint = (airgap) x (airgap mesh coefficient)
-
Airgap mesh coefficient is set to 1.5 by default.
The variation range of values for this parameter is [0.05; 2].
0.05 gives a very high mesh density and 2 gives a very coarse mesh density.
However, this always leads to a huge number of nodes in the corresponding finite element model. So, it means a need of huge numerical memory and increases the computation time considerably
3.6 Rotor d-axis location
The computations are performed by considering a relative angular position between rotor and stator.
For the reluctance synchronous machines, the rotor d-axis location is defined and automatically used to perform computations.
This value is characterized by the saliency topology. This is important to keep in mind this information it.
For more details, please refer to the document: MotorFactory_2026_SMRSM_IR_3PH_Test_Introduction – section “Rotor and stator relative position”.