
铰接
使用“铰接”工具创建和编辑铰接。
铰接会创建低副约束。约束的定义是从主体上移除自由度 (DOF)。每个主体共有六个 DOF,三个平移 DOF 和三个旋转 DOF。
低副约束是一种理想化的约束形式,其中的约束可以用属于两个不同主体的两个参考帧(坐标系)来表示。
通过不同方向的约束组合,可以实现各种类型的铰接。
| 铰接类型 | 说明 | 移除平移 DOF | 移除旋转 DOF | 移除 DOF 总数 | 添加摩擦力 |
|---|---|---|---|---|---|
| 旋转
|
单 DOF 约束,也称为销或合叶铰接,可绕单轴旋转。它通常用于门合叶和折叠结构等机制中。 | 3 | 2 | 5 | 是 |
| 球和球承窝
|
三 DOF 约束,也称为球形铰接,允许绕三个轴旋转。它通常用于通过拉杆连接转向节的转向齿条以及转向节与控制臂铰接等机制中。 | 3 | 0 | 3 | 是 |
| 平移
|
单 DOF 约束,可沿单轴进行线性运动。它通常用于样条轴和滑块装配等机制中。 | 2 | 3 | 5 | 是 |
| 通用
|
双 DOF 约束,可绕两个轴旋转。虽然在功能上与 Hooke 铰接相同,但两者的区别在于如何定义。通用铰接通常用于螺旋桨轴、传动轴和转向柱等应用中。 | 3 | 1 | 4 | 是 |
| 内联
|
一种四 DOF 基元约束,该约束会限制运动,使得一个零件(零件 1)上参考标记的原点沿另一个零件(零件 2)上参考标记的 Z 轴平移。它允许两零件之间有三个旋转 DOF 和一个平移 DOF。* | 2 | 0 | 2 | 否 |
| 固定
|
零 DOF 约束,在两个零件之间建立刚性连接,迫使它们作为一个整体移动。它用于仿真相对位移被理想化为零的连接,如螺栓连接或焊接铰接,以及在运动和方向上都保持固定的组件。 | 3 | 3 | 6 | 否 |
| 面内
|
一种五 DOF 基元约束,该约束会限制一个零件(零件 1)始终位于与之相连的零件(零件 2)所定义的 XY 平面内。它允许三个旋转 DOF 和两个平移 DOF,同时防止垂直于平面的运动。* | 1 | 0 | 1 | 否 |
| 圆柱形
|
双 DOF 约束,类似于平移铰接,但增加了一个额外的旋转 DOF。它常见于减震器管、杆和液压缸-杆对等机制中。 | 2 | 2 | 4 | 是 |
| 平面
|
三 DOF 约束,限制一个零件上的平面保持在另一个零件上定义的平面内。两个平面只能彼此平行移动和旋转。 | 1 | 2 | 3 | 否 |
| 恒定速度
|
双 DOF 约束,限制一个零件绕指定轴线的旋转等于另一个零件的旋转。恒定速度铰接广泛应用于独立悬挂系统车辆的传动轴。 | 3 | 1 | 4 | 否 |
| 点上
|
与球和球承窝铰接相同的三 DOF 约束。 | 3 | 0 | 3 | 否 |
| 方向
|
三 DOF 约束,限制两个零件之间的所有旋转运动,同时允许平移运动保持自由。* | 0 | 3 | 3 | 否 |
| 平行轴
|
一种四 DOF 基元约束,限制两个零件只能绕公共轴旋转。所有平移运动都是自由的。* | 0 | 2 | 2 | 否 |
| 垂直轴
|
一种五 DOF 基元约束,限制一个零件上的轴与另一个零件上的轴保持垂直。所有平移运动都是自由的。* | 0 | 1 | 1 | 否 |
| 螺栓
|
一个五 DOF 约束,施加了一个零件(零件 1)绕轴旋转与另一个零件(零件 2)沿另一条轴平移之间的关系。这种关系由铰接的间距决定,第一个零件旋转一圈,第二个零件就会平移一个与间距相等的距离。螺旋铰接通常用于螺栓和螺母装配以及齿轮齿条式转向机构等应用中。 | 1 | 0 | 1 | 否 |
Inspire 接缝可设置为柔顺或非柔顺。此功能有助于将任何连接切换为理想化约束(铰接)或具有刚度和阻尼的衬套。
- 非柔顺铰接
- 非柔顺铰接作为纯约束,只允许特定铰接类型的 DOF 之间进行相对运动。
- 柔顺铰接
- 柔顺铰接与衬套相同,允许在所有六个 DOF 中进行相对运动。相对运动取决于柔顺铰接的刚度和阻尼。要使铰接柔顺,必须启用柔顺选项。
注: 启用柔顺选项后,系统中铰接的柔顺状态可在系统级进行控制。
注: 与常规铰接不同,基元约束可能没有物理形式,但在常规铰接不可行的情况下,基元约束可用于施加特定的约束。
添加铰接
-
在“运动”功能区的“配置文件”下,选择 Analyst。

-
在“连接”下,选择铰接工具。

提示: 要查找并打开工具,按 Ctrl+F。更多信息,请见查找和搜索工具。将显示操作面板。图 1. 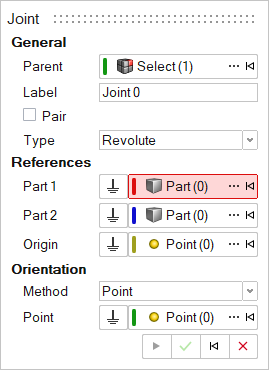
- 可选: 要选择父系统,请点击 ...。
- 可选: 编辑标签。
- 可选:
要创建实体对,请打开配对。
注: 实体对是指在一个定义中组合两个相同类型的实体。它有左右两侧。具有属性的实体可标记为对称,其中一侧为主导侧。然后,另一侧即为从属侧。从属侧的属性会在全局 X-Z 平面上从主导侧反映出来。
- 要创建一个关于 X-Z 平面对称的模型,请在属性编辑器的“常规”下,将对称设置为左或右。
- 要创建不对称模型,请将对称设置为无。
-
选择铰接类型
注: 更多信息请见铰接。
-
通过点击模型视窗中的零件或使用高级选择器 ... 解析零件 1 收集器。
所选主体现在应该以红色高亮显示。
-
通过选择不同的部分来解析零件 2 收集器。
所选主体将以蓝色高亮显示。
-
选择一个硬点作为原点。
- 要选择一个现有硬点,请执行以下任一操作:
- 在模型视窗中,选择硬点。
- 点击 ...,然后在模型树中选择一个点。
- 要创建新的硬点,请选择零件上的顶点、中点、边或面。选择边缘或面时,将在边缘或面的中心创建点。
- 要选择全局原点,请点击
 。
。
- 要选择一个现有硬点,请执行以下任一操作:
-
选择定向方法。
注: 根据铰接类型,选择一个或两个轴。每个轴都可以通过硬点端点或矢量来定义。
-
点击应用
 。
实体会出现在模型浏览器中,其属性会出现在属性编辑器中。
。
实体会出现在模型浏览器中,其属性会出现在属性编辑器中。 -
鼠标右击划过勾选标记以退出,或双击鼠标右键。
注: 默认情况下,Inspire 中实体的变量名会遵循一定的约定。例如,所有铰接实体的变量名都以 "Joint_" 开头。这是在 Inspire 中创建模型时建议遵循的约定,因为它在模型编辑和模型操作方面有许多优势。
编辑铰接
铰接属性
属性编辑器中铰接属性的描述。
| 属性 | 说明 |
|---|---|
| 常规 | |
| 标签 | 实体的描述性标签 |
| 变量名称 | 实体的变量名 |
| ID | 整数标识符 |
| 零件 1 | 铰接的第一个零件 |
| 零件 2 | 铰接的第二个零件 |
| 对称 |
|
| 原点 | 铰接的原点 |
| 类型 | 铰接类型 |
| 使用虚拟 | 将铰接设置为虚拟 |
| 柔顺 | 柔顺铰接状态。True 或 False。如果为“True”,则铰接符合要求,代表衬套。使用允许柔顺性选项创建铰接时,该属性可见。 |
| 摩擦 | |
| 使用摩擦 | 打开铰接的摩擦。请参阅“摩擦属性”部分。 |
| 方向 | 使用此部分来确定非柔顺铰接的方向。定向类型和方法取决于铰接类型。 |
| 对齐类型(类型 1 | 类型 2) | 仅适用于通用、内联、面内、平面和平行轴。选择所需的对齐类型。请参阅下方备注。 |
| 方法(方法 1 | 方法 2) | 铰接单轴或多轴定向方法。可选项有“点”和“矢量”。 |
| 点|矢量 | 根据所选的方法选择点或矢量。铰接将沿着点的方向或从原点出发的或矢量进行定向。 |
| 初始条件 | 对铰接施加初始速度条件。适用于旋转铰接、平移铰接和圆柱铰接。 |
| 用旋转 | 为旋转铰接或圆柱铰接施加初始旋转速度 |
| 旋转速度 | 旋转速度值(单位:rad/sec) |
| 使用平移 | 为平移铰接或圆柱铰接施加初始旋转速度 |
| 平移速度 | 以模型速度单位表示的平移速度值 |
| 柔性体连接半径 | |
| 覆盖 | 覆盖自动连接半径。适用于柔性体上的铰接。 |
| 连接半径 | 在柔性体上施加连接时,覆盖搜索距离以将实体与刚性单元连接起来。有关详细信息,请参阅连接半径。 |
注: 柔顺铰接的属性与衬套的属性相同。
- 关于非柔顺铰接方向的说明
- 通过定义两个零件之间的连接,使用属于每个零件的两个标记或坐标系(I 标记和 J 标记)来施加零件之间的约束。通过定位铰接,这些标记会沿着铰接具有自由度的特定方向(通常是标记的 Z 轴)进行定位。
图 2. 沿某一点定向的旋转铰接 Z 轴 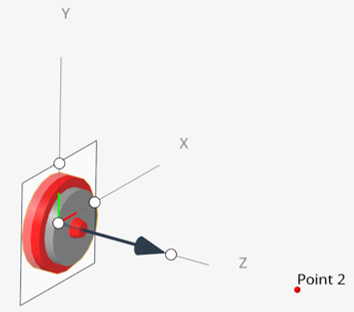
- 对齐类型
- 根据铰接类型的不同,某些铰接有不同的排列方式。
- 通用铰接可以通过对齐轴方向或十字销(与轴垂直,是轭架的一部分)两侧的方向来对齐。
- 可以通过沿点或矢量对齐轴,或提供另一个原点原点 2 来对齐内联铰接。
- 面内、平面和平行轴铰接可以通过指定平面的法线(点或矢量)或使用点或矢量的两个输入定义平面来对齐。
有关虚拟铰接的信息,请参阅约束:铰接,备注 17,位于 MotionSolve 文档中。
- 添加摩擦力
- 摩擦力可添加到下列非柔顺铰接中:球形、旋转、平移、圆柱和通用。有关详细信息,请参阅 HyperWorks 文档中的编辑铰接,铰接属性表。